

Will the next extinction-scale asteroid strike the Earth in our lifetime?
This existential question—the question of our continued existence on this planet—is rhetorical, because there are far too many bodies in our solar system to accurately calculate all trajectories of all asteroids.
The solar system is what is known as an N-body problem. And even the N is not well determined. The asteroid belt alone has over a million extinction-sized asteroids, and there are tens of millions of smaller ones that could still do major damage to life on Earth if they hit. To have a hope of calculating even one asteroid trajectory do we ignore planetary masses that are too small? What is too small? What if we only consider the Sun, the Earth and Jupiter? This is what Euler did in 1760, and he still had to make more assumptions.
Stability of the Solar System
Once Newton published his Principia, there was a pressing need to calculate the orbit of the Moon (see my blog post on the three-body problem). This was important for navigation, because if the daily position of the moon could be known with sufficient accuracy, then ships would have a means to determine their longitude at sea. However, the Moon, Earth and Sun are already a three-body problem, which still ignores the effects of Mars and Jupiter on the Moon’s orbit, not to mention the problem that the Earth is not a perfect sphere. Therefore, to have any hope of success, toy systems that were stripped of all their obfuscating detail were needed.
Euler investigated simplified versions of the three-body problem around 1760, treating a body attracted to two fixed centers of gravity moving in the plane, and he solved it using elliptic integrals. When the two fixed centers are viewed in a coordinate frame that is rotating with the Sun-Earth system, it can come close to capturing many of the important details of the system. In 1762 Euler tried another approach, called the restricted three-body problem, where he considered a massless Moon attracted to a massive Earth orbiting a massive Sun, again all in the plane. Euler could not find general solutions to this problem, but he did stumble on an interesting special case when the three bodies remain collinear throughout their motions in a rotating reference frame.
It was not the danger of asteroids that was the main topic of interest in those days, but the question whether the Earth itself is in a stable orbit and is safe from being ejected from the Solar system. Despite steadily improving methods for calculating astronomical trajectories through the nineteenth century, this question of stability remained open.
Poincaré and the King Oscar Prize of 1889
Some years ago I wrote an article for Physics Today called “The Tangled Tale of Phase Space” that tracks the historical development of phase space. One of the chief players in that story was Henri Poincaré (1854 – 1912). Henri Poincare was the Einstein before Einstein. He was a minor celebrity and was considered to be the greatest genius of his era. The event in his early career that helped launch him to stardom was a mathematics prize announced in 1887 to honor the birthday of King Oscar II of Sweden. The challenge problem was as simple as it was profound: Prove rigorously whether the solar system is stable.
This was the old N-body problem that had so far resisted solution, but there was a sense at that time that recent mathematical advances might make the proof possible. There was even a rumor that Dirichlet had outlined such a proof, but no trace of the outline could be found in his papers after his death in 1859.
The prize competition was announced in Acta Mathematica, written by the Swedish mathematician Gösta Mittag-Leffler. It stated:
Given a system of arbitrarily many mass points that attract each according to Newton’s law, under the assumption that no two points ever collide, try to find a representation of the coordinates of each point as a series in a variable that is some known function of time and for all of whose values the series converges uniformly.
The timing of the prize was perfect for Poincaré who was in his early thirties and just beginning to make his mark on mathematics. He was working on the theory of dynamical systems and was developing a new viewpoint that went beyond integrating single trajectories by focusing more broadly on whole classes of solutions. The question of the stability of the solar system seemed like a good problem to use to sharpen his mathematical tools. The general problem was still too difficult, so he began with Euler’s restricted three-body problem. He made steady progress, and along the way he invented an array of new techniques for studying the general properties of dynamical systems. One of these was the Poincaré section. Another was his set of integral invariants, one of which is recognized as the conservation of volume in phase space, also known as Liouville’s theorem, although it was Ludwig Boltzmann who first derived this result (see my Physics Today article). Eventually, he believed he had proven that the restricted three-body problem was stable.
By the time Poincaré had finished is prize submission, he had invented a new field of mathematical analysis, and the judges of the prize submission recognized it. Poincaré was named the winner, and his submission was prepared for publication in the Acta. However, Mittag-Leffler was a little concerned by a technical objection that had been raised, so he forwarded the comment to Poincaré for him to look at. At first, Poincaré thought the objection could easily be overcome, but as he worked on it and delved deeper, he had a sudden attack of panic. Trajectories near a saddle point did not converge. His proof of stability was wrong!
He alerted Mittag-Leffler to stop the presses, but it was too late. The first printing had been completed and review copies had already been sent to the judges. Mittag-Leffler immediately wrote to them asking for their return while Poincaré worked nonstop to produce a corrected copy. When he had completed his reanalysis, he had discovered a divergent feature of the solution to the dynamical problem near saddle points that is recognized today as the discovery of chaos. Poincaré paid for the reprinting of his paper out of his own pocket and (almost) all of the original printing was destroyed. This embarrassing moment in the life of a great mathematician was virtually forgotten until it was brought to light by the historian Barrow-Green in 1994 [1].



Chaos in the Poincaré Return Map
Despite the fact that his conclusions on the stability of the 3-body problem flipped, Poincaré’s new tools for analyzing dynamical systems earned him the prize. He did not stop at his modified prize submission but continued working on systematizing his methods, publishing New Methods in Celestial Mechanics in several volumes through the 1890’s. It was here that he fully explored what happens when a trajectory approaches a saddle point of dynamical equilibrium.

To visualize a periodic trajectory, Poincaré invented a mathematical tool called a “first-return map”, also known as a Poincaré section. It was a way of taking a higher dimensional continuous trajectory and turning it into a simple iterated discrete map. Therefore, one did not need to solve continuous differential equations, it was enough to just iterate the map. In this way, complicated periodic, or nearly periodic, behavior could be explored numerically. However, even armed with this weapon, Poincaré found that iterated maps became unstable as a trajectory that originated from a saddle point approached another equivalent saddle point. Because the dynamics are periodic, the outgoing and incoming trajectories are opposite ends of the same trajectory, repeated with 2-pi periodicity. Therefore, the saddle point is also called a homoclinic point, meaning that trajectories in the discrete map intersect with themselves. (If two different trajectories in the map intersect, that is called a heteroclinic point.) When Poincaré calculated the iterations around the homoclinic point, he discovered a wild and complicated pattern in which a trajectory intersected itself many times. Poincaré wrote:
[I]f one seeks to visualize the pattern formed by these two curves and their infinite number of intersections … these intersections form a kind of lattice work, a weave, a chain-link network of infinitely fine mesh; each of the two curves can never cross itself, but it must fold back on itself in a very complicated way so as to recross all the chain-links an infinite number of times .… One will be struck by the complexity of this figure, which I am not even attempting to draw. Nothing can give us a better idea of the intricacy of the three-body problem, and of all the problems of dynamics in general…
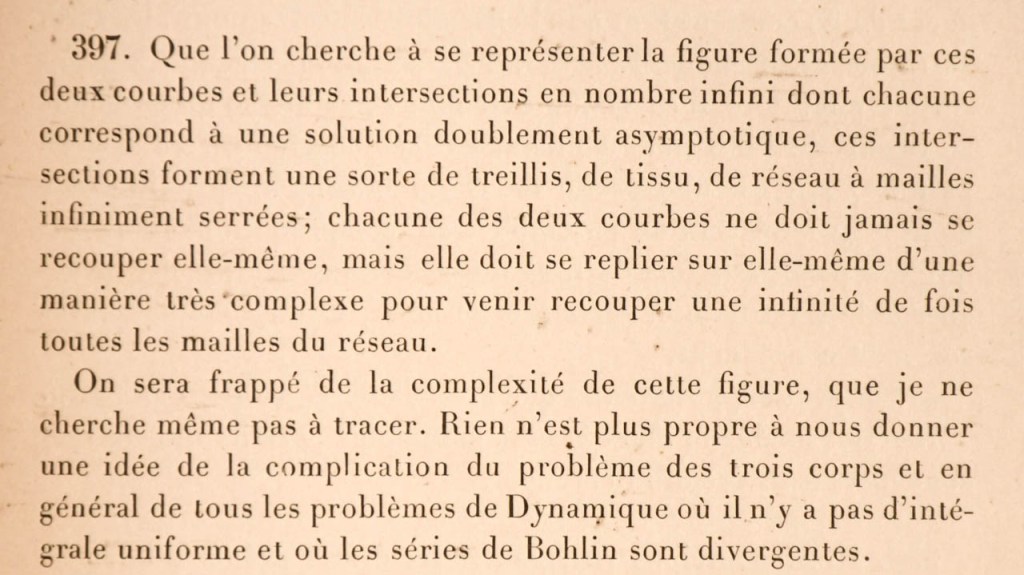
This was the discovery of chaos! Today we call this “lattice work” the “homoclinic tangle”. He could not draw it with the tools of his day … but we can!
Chirikov’s Standard Map
The restricted 3-body problem is a bit more complicated than is needed to illustrate Poincaré’s homoclinic tangle. A much simpler model is a discrete map called Chirikov’s Map or the Standard Map. It describes the Poincaré section of a periodically kicked oscillator that rotates or oscillates in the angular direction with an angular momentm J. The map has the simple form
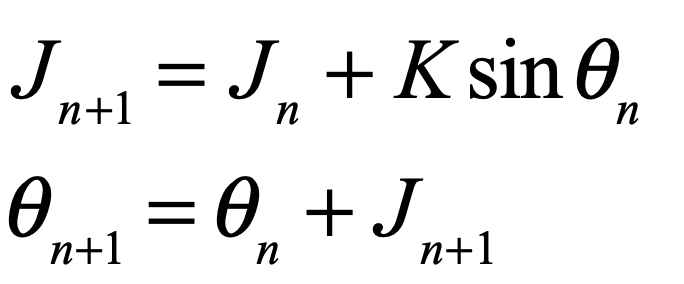
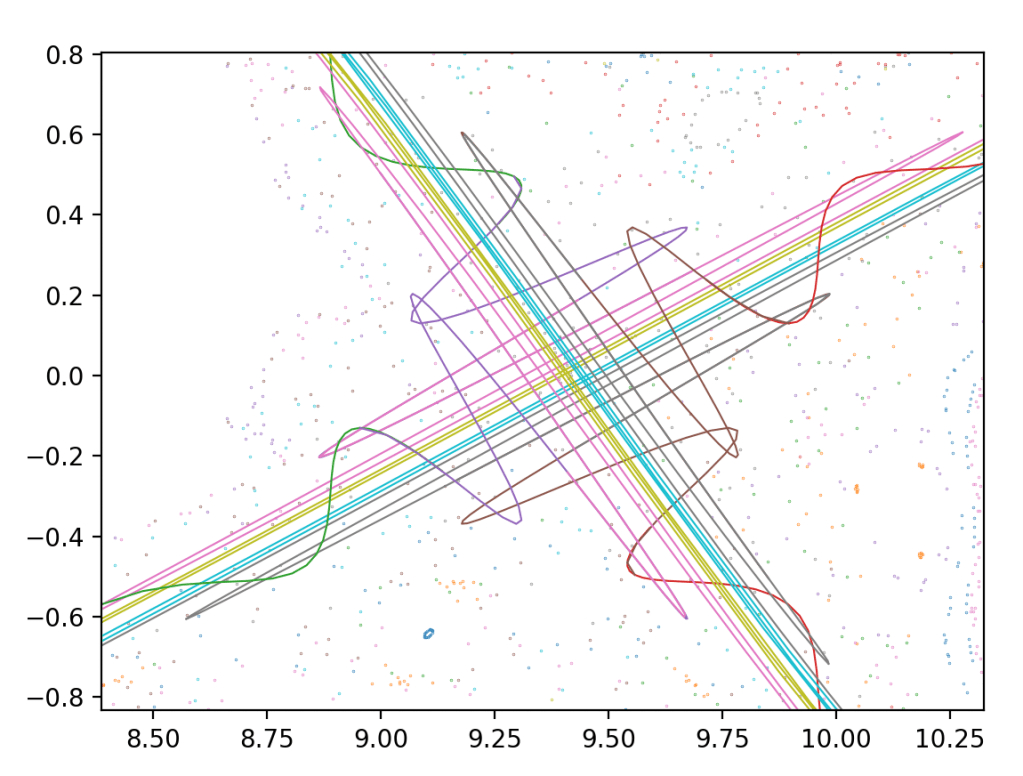
in which the angular momentum in updated first, and then the angle variable is updated with the new angular momentum. When plotted on the (θ,J) plane, the standard map produces a beautiful kaleidograph of intertwined trajectories piercing the Poincaré plane, as shown in the figure below. The small points or dots are successive intersections of the higher-dimensional trajectory intersecting a plane. It is possible to trace successive points by starting very close to a saddle point (on the left) and connecting successive iterates with lines. These lines merge into the black trace in the figure that emerges along the unstable manifold of the saddle point on the left and approaches the saddle point on the right generally along the stable manifold.

However, as the successive iterates approach the new saddle (which is really just the old saddle point because of periodicity) it crosses the stable manifold again and again, in ever wilder swings that diverge as it approaches the saddle point. This is just one trace. By calculating traces along all four stable and unstable manifolds and carrying them through to the saddle, a lattice work, or homoclinic tangle emerges.
Two of those traces originate from the stable manifolds, so to calculate their contributions to the homoclinic tangle, one must run these traces backwards in time using the inverse Chirikov map. This is

The four traces all intertwine at the saddle point in the figure below with a zoom in on the tangle in the next figure. This is the lattice work that Poincaré glimpsed in 1889 as he worked feverishly to correct the manuscript that won him the prize that established him as one of the preeminent mathematicians of Europe.

The Path from Galileo’s Trajectory to Complex Systems and Quantum Science.
Read more about the history of chaos theory in Galileo Unbound from Oxford University Press

Python Code: StandmapHom.py
(Python code on GitHub.)
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
StandmapHom.py
Created on Sun Aug 2 2020
"Introduction to Modern Dynamics" 2nd Edition (Oxford, 2019)
@author: nolte
"""
import numpy as np
from matplotlib import pyplot as plt
from numpy import linalg as LA
plt.close('all')
eps = 0.97
np.random.seed(2)
plt.figure(1)
for eloop in range(0,100):
rlast = 2*np.pi*(0.5-np.random.random())
thlast = 4*np.pi*np.random.random()
rplot = np.zeros(shape=(200,))
thetaplot = np.zeros(shape=(200,))
for loop in range(0,200):
rnew = rlast + eps*np.sin(thlast)
thnew = np.mod(thlast+rnew,4*np.pi)
thetaplot[loop] = np.mod(thnew-np.pi,4*np.pi)
rtemp = np.mod(rnew + np.pi,2*np.pi)
rplot[loop] = rtemp - np.pi
rlast = rnew
thlast = thnew
plt.plot(np.real(thetaplot),np.real(rplot),'o',ms=0.2)
plt.xlim(xmin=np.pi,xmax=4*np.pi)
plt.ylim(ymin=-2.5,ymax=2.5)
plt.savefig('StandMap')
K = eps
eps0 = 5e-7
J = [[1,1+K],[1,1]]
w, v = LA.eig(J)
My = w[0]
Vu = v[:,0] # unstable manifold
Vs = v[:,1] # stable manifold
# Plot the unstable manifold
Hr = np.zeros(shape=(100,150))
Ht = np.zeros(shape=(100,150))
for eloop in range(0,100):
eps = eps0*eloop
roldu1 = eps*Vu[0]
thetoldu1 = eps*Vu[1]
Nloop = np.ceil(-6*np.log(eps0)/np.log(eloop+2))
flag = 1
cnt = 0
while flag==1 and cnt < Nloop:
ru1 = roldu1 + K*np.sin(thetoldu1)
thetau1 = thetoldu1 + ru1
roldu1 = ru1
thetoldu1 = thetau1
if thetau1 > 4*np.pi:
flag = 0
Hr[eloop,cnt] = roldu1
Ht[eloop,cnt] = thetoldu1 + 3*np.pi
cnt = cnt+1
x = Ht[0:99,12] - 2*np.pi
x2 = 6*np.pi - x
y = Hr[0:99,12]
y2 = -y
plt.plot(x,y,linewidth =0.75)
plt.plot(x2,y2,linewidth =0.75)
del x,y
x = Ht[5:39,15] - 2*np.pi
x2 = 6*np.pi - x
y = Hr[5:39,15]
y2 = -y
plt.plot(x,y,linewidth =0.75)
plt.plot(x2,y2,linewidth =0.75)
del x,y
x = Ht[12:69,16] - 2*np.pi
x2 = 6*np.pi - x
y = Hr[12:69,16]
y2 = -y
plt.plot(x,y,linewidth =0.75)
plt.plot(x2,y2,linewidth =0.75)
del x,y
x = Ht[15:89,17] - 2*np.pi
x2 = 6*np.pi - x
y = Hr[15:89,17]
y2 = -y
plt.plot(x,y,linewidth =0.75)
plt.plot(x2,y2,linewidth =0.75)
del x,y
x = Ht[30:99,18] - 2*np.pi
x2 = 6*np.pi - x
y = Hr[30:99,18]
y2 = -y
plt.plot(x,y,linewidth =0.75)
plt.plot(x2,y2,linewidth =0.75)
# Plot the stable manifold
del Hr, Ht
Hr = np.zeros(shape=(100,150))
Ht = np.zeros(shape=(100,150))
#eps0 = 0.03
for eloop in range(0,100):
eps = eps0*eloop
roldu1 = eps*Vs[0]
thetoldu1 = eps*Vs[1]
Nloop = np.ceil(-6*np.log(eps0)/np.log(eloop+2))
flag = 1
cnt = 0
while flag==1 and cnt < Nloop:
thetau1 = thetoldu1 - roldu1
ru1 = roldu1 - K*np.sin(thetau1)
roldu1 = ru1
thetoldu1 = thetau1
if thetau1 > 4*np.pi:
flag = 0
Hr[eloop,cnt] = roldu1
Ht[eloop,cnt] = thetoldu1
cnt = cnt+1
x = Ht[0:79,12] + np.pi
x2 = 6*np.pi - x
y = Hr[0:79,12]
y2 = -y
plt.plot(x,y,linewidth =0.75)
plt.plot(x2,y2,linewidth =0.75)
del x,y
x = Ht[4:39,15] + np.pi
x2 = 6*np.pi - x
y = Hr[4:39,15]
y2 = -y
plt.plot(x,y,linewidth =0.75)
plt.plot(x2,y2,linewidth =0.75)
del x,y
x = Ht[12:69,16] + np.pi
x2 = 6*np.pi - x
y = Hr[12:69,16]
y2 = -y
plt.plot(x,y,linewidth =0.75)
plt.plot(x2,y2,linewidth =0.75)
del x,y
x = Ht[15:89,17] + np.pi
x2 = 6*np.pi - x
y = Hr[15:89,17]
y2 = -y
plt.plot(x,y,linewidth =0.75)
plt.plot(x2,y2,linewidth =0.75)
del x,y
x = Ht[30:99,18] + np.pi
x2 = 6*np.pi - x
y = Hr[30:99,18]
y2 = -y
plt.plot(x,y,linewidth =0.75)
plt.plot(x2,y2,linewidth =0.75)
References
[1] D. D. Nolte, “The tangled tale of phase space,” Physics Today, vol. 63, no. 4, pp. 33-38, Apr (2010)
[2] M. C. Gutzwiller, “Moon-Earth-Sun: The oldest three-body problem,” Reviews of Modern Physics, vol. 70, no. 2, pp. 589-639, Apr (1998)
[3] Barrow-Green J. Oscar II’s Prize Competition and the Error in Poindare’s Memoir on the Three Body Problem. Arch Hist Exact Sci 48: 107-131, 1994.
[4] Barrow-Green J. Poincaré and the three body problem. London Mathematical Society, 1997.
[5] https://the-moon.us/wiki/Poincar%C3%A9
[6] Poincaré H and Goroff DL. New methods of celestial mechanics … Edited and introduced by Daniel L. Goroff. New York: American Institute of Physics, 1993.

[…] Henri Poincaré and his Homoclinic Tangle […]
LikeLike
[…] Henri Poincaré and his Homoclinic Tangle […]
LikeLike