

The 1960’s are known as a time of cultural revolution, but perhaps less known was the revolution that occurred in the science of dynamics. Three towering figures of that revolution were Stephen Smale (1930 – ) at Berkeley, Andrey Kolmogorov (1903 – 1987) in Moscow and his student Vladimir Arnold (1937 – 2010). Arnold was only 20 years old in 1957 when he solved Hilbert’s thirteenth problem (that any continuous function of several variables can be constructed with a finite number of two-variable functions). Only a few years later his work on the problem of small denominators in dynamical systems provided the finishing touches on the long elusive explanation of the stability of the solar system (the problem for which Poincaré won the King Oscar Prize in mathematics in 1889 when he discovered chaotic dynamics ). This theory is known as KAM-theory, using the first initials of the names of Kolmogorov, Arnold and Moser [1]. Building on his breakthrough in celestial mechanics, Arnold’s work through the 1960’s remade the theory of Hamiltonian systems, creating a shift in perspective that has permanently altered how physicists look at dynamical systems.
Hamiltonian Physics on a Torus
Traditionally, Hamiltonian physics is associated with systems of inertial objects that conserve the sum of kinetic and potential energy, in other words, conservative non-dissipative systems. But a modern view (after Arnold) of Hamiltonian systems sees them as hyperdimensional mathematical mappings that conserve volume. The space that these mappings inhabit is phase space, and the conservation of phase-space volume is known as Liouville’s Theorem [2]. The geometry of phase space is called symplectic geometry, and the universal position that symplectic geometry now holds in the physics of Hamiltonian mechanics is largely due to Arnold’s textbook Mathematical Methods of Classical Mechanics (1974, English translation 1978) [3]. Arnold’s famous quote from that text is “Hamiltonian mechanics is geometry in phase space”.
One of the striking aspects of this textbook is the reduction of phase-space geometry to the geometry of a hyperdimensional torus for a large number of Hamiltonian systems. If there are as many conserved quantities as there are degrees of freedom in a Hamiltonian system, then the system is called “integrable” (because you can integrated the equations of motion to find a constant of the motion). Then it is possible to map the physics onto a hyperdimensional torus through the transformation of dynamical coordinates into what are known as “action-angle” coordinates [4]. Each independent angle has an associated action that is conserved during the motion of the system. The periodicity of the dynamical angle coordinate makes it possible to identify it with the angular coordinate of a multi-dimensional torus. Therefore, every integrable Hamiltonian system can be mapped to motion on a multi-dimensional torus (one dimension for each degree of freedom of the system).
Actually, integrable Hamiltonian systems are among the most boring dynamical systems you can imagine. They literally just go in circles (around the torus). But as soon as you add a small perturbation that cannot be integrated they produce some of the most complex and beautiful patterns of all dynamical systems. It was Arnold’s focus on motions on a torus, and perturbations that shift the dynamics off the torus, that led him to propose a simple mapping that captured the essence of Hamiltonian chaos.
The Arnold Cat Map
Motion on a two-dimensional torus is defined by two angles, and trajectories on a two-dimensional torus are simple helixes. If the periodicities of the motion in the two angles have an integer ratio, the helix repeats itself. However, if the ratio of periods (also known as the winding number) is irrational, then the helix never repeats and passes arbitrarily closely to any point on the surface of the torus. This last case leads to an “ergodic” system, which is a term introduced by Boltzmann to describe a physical system whose trajectory fills phase space. The behavior of a helix for rational or irrational winding number is not terribly interesting. It’s just an orbit going in circles like an integrable Hamiltonian system. The helix can never even cross itself.
However, if you could add a new dimension to the torus (or add a new degree of freedom to the dynamical system), then the helix could pass over or under itself by moving into the new dimension. By weaving around itself, a trajectory can become chaotic, and the set of many trajectories can become as mixed up as a bowl of spaghetti. This can be a little hard to visualize, especially in higher dimensions, but Arnold thought of a very simple mathematical mapping that captures the essential motion on a torus, preserving volume as required for a Hamiltonian system, but with the ability for regions to become all mixed up, just like trajectories in a nonintegrable Hamiltonian system.
A unit square is isomorphic to a two-dimensional torus. This means that there is a one-to-one mapping of each point on the unit square to each point on the surface of a torus. Imagine taking a sheet of paper and forming a tube out of it. One of the dimensions of the sheet of paper is now an angle coordinate that is cyclic, going around the circumference of the tube. Now if the sheet of paper is flexible (like it is made of thin rubber) you can bend the tube around and connect the top of the tube with the bottom, like a bicycle inner tube. The other dimension of the sheet of paper is now also an angle coordinate that is cyclic. In this way a flat sheet is converted (with some bending) into a torus.
Arnold’s key idea was to create a transformation that takes the torus into itself, preserving volume, yet including the ability for regions to pass around each other. Arnold accomplished this with the simple map
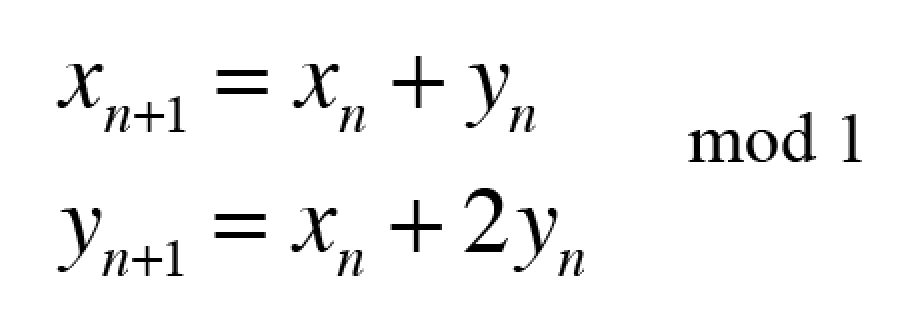
where the modulus 1 takes the unit square into itself. This transformation can also be expressed as a matrix
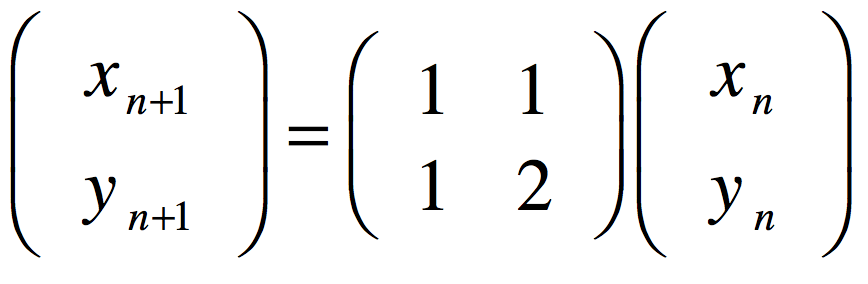
followed by taking modulus 1. The transformation matrix is called a Floquet matrix, and the determinant of the matrix is equal to unity, which ensures that volume is conserved.
Arnold decided to illustrate this mapping by using a crude image of the face of a cat (See Fig. 1). Successive applications of the transformation stretch and shear the cat, which is then folded back into the unit square. The stretching and folding preserve the volume, but the image becomes all mixed up, just like mixing in a chaotic Hamiltonian system, or like an immiscible dye in water that is stirred.


Recurrence
When the transformation matrix is applied to continuous values, it produces a continuous range of transformed values that become thinner and thinner until the unit square is uniformly mixed. However, if the unit square is discrete, made up of pixels, then something very different happens (see Fig. 3). The image of the cat in this case is composed of a 50×50 array of pixels. For early iterations, the image becomes stretched and mixed, but at iteration 50 there are 4 low-resolution upside-down versions of the cat, and at iteration 75 the cat fully reforms, but is upside-down. Continuing on, the cat eventually reappears fully reformed and upright at iteration 150. Therefore, the discrete case displays a recurrence and the mapping is periodic. Calculating the period of the cat map on lattices can lead to interesting patterns, especially if the lattice is composed of prime numbers [6].

The Cat Map and the Golden Mean
The golden mean, or the golden ratio, 1.618033988749895 is never far away when working with Hamiltonian systems. Because the golden mean is the “most irrational” of all irrational numbers, it plays an essential role in KAM theory on the stability of the solar system. In the case of Arnold’s cat map, it pops up its head in several ways. For instance, the transformation matrix has eigenvalues
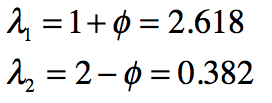
with the remarkable property that
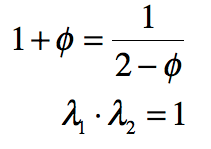
which guarantees conservation of area.
Selected V. I. Arnold Publications
Arnold, V. I. “FUNCTIONS OF 3 VARIABLES.” Doklady Akademii Nauk Sssr 114(4): 679-681. (1957)
Arnold, V. I. “GENERATION OF QUASI-PERIODIC MOTION FROM A FAMILY OF PERIODIC MOTIONS.” Doklady Akademii Nauk Sssr 138(1): 13-&. (1961)
Arnold, V. I. “STABILITY OF EQUILIBRIUM POSITION OF A HAMILTONIAN SYSTEM OF ORDINARY DIFFERENTIAL EQUATIONS IN GENERAL ELLIPTIC CASE.” Doklady Akademii Nauk Sssr 137(2): 255-&. (1961)
Arnold, V. I. “BEHAVIOUR OF AN ADIABATIC INVARIANT WHEN HAMILTONS FUNCTION IS UNDERGOING A SLOW PERIODIC VARIATION.” Doklady Akademii Nauk Sssr 142(4): 758-&. (1962)
Arnold, V. I. “CLASSICAL THEORY OF PERTURBATIONS AND PROBLEM OF STABILITY OF PLANETARY SYSTEMS.” Doklady Akademii Nauk Sssr 145(3): 487-&. (1962)
Arnold, V. I. “BEHAVIOUR OF AN ADIABATIC INVARIANT WHEN HAMILTONS FUNCTION IS UNDERGOING A SLOW PERIODIC VARIATION.” Doklady Akademii Nauk Sssr 142(4): 758-&. (1962)
Arnold, V. I. and Y. G. Sinai. “SMALL PERTURBATIONS OF AUTHOMORPHISMS OF A TORE.” Doklady Akademii Nauk Sssr 144(4): 695-&. (1962)
Arnold, V. I. “Small denominators and problems of the stability of motion in classical and celestial mechanics (in Russian).” Usp. Mat. Nauk. 18: 91-192. (1963)
Arnold, V. I. and A. L. Krylov. “UNIFORM DISTRIBUTION OF POINTS ON A SPHERE AND SOME ERGODIC PROPERTIES OF SOLUTIONS TO LINEAR ORDINARY DIFFERENTIAL EQUATIONS IN COMPLEX REGION.” Doklady Akademii Nauk Sssr 148(1): 9-&. (1963)
Arnold, V. I. “INSTABILITY OF DYNAMICAL SYSTEMS WITH MANY DEGREES OF FREEDOM.” Doklady Akademii Nauk Sssr 156(1): 9-&. (1964)
Arnold, V. “SUR UNE PROPRIETE TOPOLOGIQUE DES APPLICATIONS GLOBALEMENT CANONIQUES DE LA MECANIQUE CLASSIQUE.” Comptes Rendus Hebdomadaires Des Seances De L Academie Des Sciences 261(19): 3719-&. (1965)
Arnold, V. I. “APPLICABILITY CONDITIONS AND ERROR ESTIMATION BY AVERAGING FOR SYSTEMS WHICH GO THROUGH RESONANCES IN COURSE OF EVOLUTION.” Doklady Akademii Nauk Sssr 161(1): 9-&. (1965)
Bibliography
[1] Dumas, H. S. The KAM Story: A friendly introduction to the content, history and significance of Classical Kolmogorov-Arnold-Moser Theory, World Scientific. (2014)
[2] See Chapter 6, “The Tangled Tale of Phase Space” in Galileo Unbound (D. D. Nolte, Oxford University Press, 2018)
[3] V. I. Arnold, Mathematical Methods of Classical Mechanics (Nauk 1974, English translation Springer 1978)
[4] See Chapter 3, “Hamiltonian Dynamics and Phase Space” in Introduction to Modern Dynamics, 2nd ed. (D. D. Nolte, Oxford University Press, 2019)
[5] V. I. Arnold and A. Avez, Ergodic Problems of Classical Mechanics (Benjamin, 1968)
[6] Gaspari, G. “THE ARNOLD CAT MAP ON PRIME LATTICES.” Physica D-Nonlinear Phenomena 73(4): 352-372. (1994)
This Blog Post is a Companion to the undergraduate physics textbook Modern Dynamics: Chaos, Networks, Space and Time, 2nd ed. (Oxford, 2019) introducing Lagrangians and Hamiltonians, chaos theory, complex systems, synchronization, neural networks, econophysics and Special and General Relativity.


[…] Vladimir Arnold’s Cat Map […]
LikeLike
[…] Vladimir Arnold’s Cat Map […]
LikeLike
[…] Fig. 5). Action-angle coordinates have come to form the foundation of many of the properties of Hamiltonian chaos, Hamiltonian maps, and Hamiltonian […]
LikeLike
[…] David D. Nolte, Vladimir Arnold’s Cat Map, Galileo Unbound, 16 junio […]
LikeLike
[…] Vladimir Arnold’s Cat Map […]
LikeLike
[…] Vladimir Arnold’s Cat Map […]
LikeLike
[…] Vladimir Arnold’s Cat Map […]
LikeLike