

As a graduate student in physics at Berkeley in the 1980’s, I took General Relativity (aka GR), from Bruno Zumino, who was a world-famous physicist known as one of the originators of super-symmetry in quantum gravity (not to be confused with super-asymmetry of Cooper-Fowler Big Bang Theory fame). The class textbook was Gravitation and cosmology: principles and applications of the general theory of relativity, by Steven Weinberg, another world-famous physicist, in this case known for grand unification of the electro-weak force with electromagnetism. With so much expertise at hand, how could I fail but to absorb the simple essence of general relativity?
The answer is that I failed miserably. Somehow, I managed to pass the course, but I walked away with nothing! And it bugged me for years. What was so hard about GR? It took me almost a decade teaching undergraduate physics classes at Purdue in the 90’s before I realized that it my biggest obstacle had been language: I kept mistaking the words and terms of GR as if they were English. Words like “general covariance” and “contravariant” and “contraction” and “covariant derivative”. They sounded like English, with lots of “co” prefixes that were hard to keep straight, but they actually are part of a very different language that I call Physics-ese,
Physics-ese is a language that has lots of words that sound like English, and so you think you know what the words mean, but the words have sometimes opposite meanings than what you would guess. And the meanings of Physics-ese are precisely defined, and not something that can be left to interpretation. I learned this while teaching the intro courses to non-majors, because so many times when the students were confused, it turned out that it was because they had mistaken a textbook jargon term to be English. If you told them that the word wasn’t English, but just a token standing for a well-defined object or process, it would unshackle them from their misconceptions.
Then, in the early 00’s when I started to explore the physics of generalized trajectories related to some of my own research interests, I realized that the primary obstacle to my learning anything in the Gravitation course was Physics-ese. So this raised the question in my mind: what would it take to teach GR to undergraduate physics majors in a relatively painless manner? This is my answer.
More on this topic can be found in Chapter 11 of the textbook IMD2: Introduction to Modern Dynamics, 2nd Edition, Oxford University Press, 2019
Trajectories as Flows
One of the culprits for my mind block learning GR was Newton himself. His ubiquitous second law, taught as F = ma, is surprisingly misleading if one wants to have a more general understanding of what a trajectory is. This is particularly the case for light paths, which can be bent by gravity, yet clearly cannot have any forces acting on them.
The way to fix this is subtle yet simple. First, express Newton’s second law as
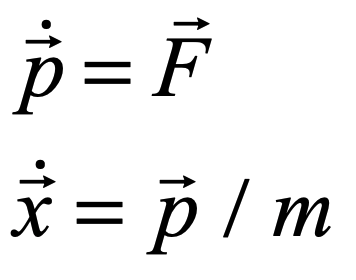
which is actually closer to the way that Newton expressed the law in his Principia. In three dimensions for a single particle, these equations represent a 6-dimensional dynamical space called phase space: three coordinate dimensions and three momentum dimensions. Then generalize the vector quantities, like the position vector, to be expressed as xa for the six dynamics variables: x, y, z, px, py, and pz.
Now, as part of Physics-ese, putting the index as a superscript instead as a subscript turns out to be a useful notation when working in higher-dimensional spaces. This superscript is called a “contravariant index” which sounds like English but is uninterpretable without a Physics-ese-to-English dictionary. All “contravariant index” means is “column vector component”. In other words, xa is just the position vector expressed as a column vector
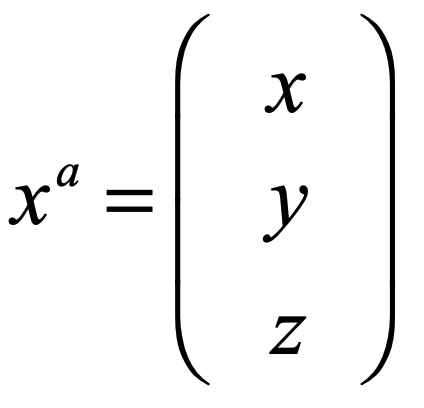
This superscripted index is called a “contravariant” index, but seriously dude, just forget that “contravariant” word from Physics-ese and just think “index”. You already know it’s a column vector.
Then Newton’s second law becomes
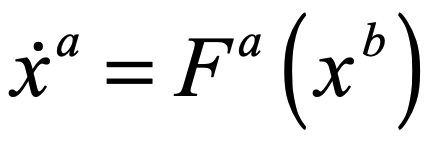
where the index a runs from 1 to 6, and the function Fa is a vector function of the dynamic variables. To spell it out, this is
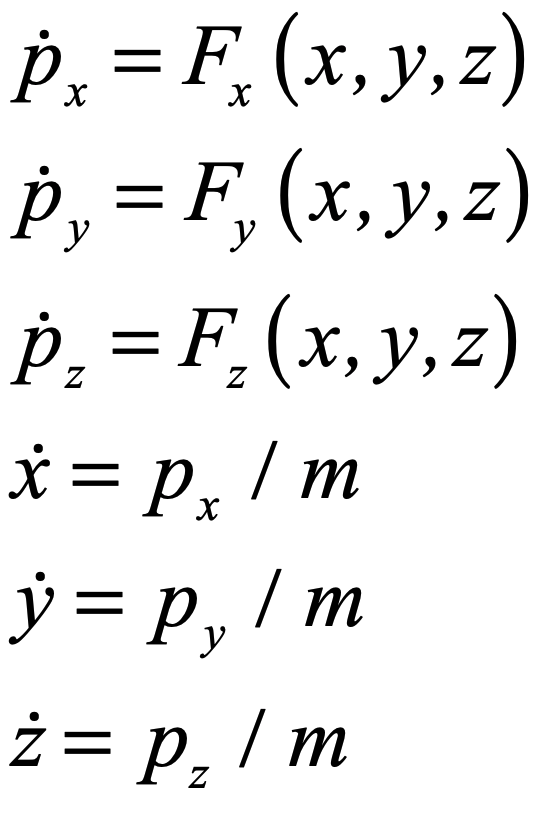
so it’s a lot easier to write it in the one-line form with the index notation.
The simple index notation equation is in the standard form for what is called, in Physics-ese, a “mathematical flow”. It is an ODE that can be solved for any set of initial conditions for a given trajectory. Or a whole field of solutions can be considered in a phase-space portrait that looks like the flow lines of hydrodynamics. The phase-space portrait captures the essential physics of the system, whether it is a rock thrown off a cliff, or a photon orbiting a black hole. But to get to that second problem, it is necessary to look deeper into the way that space is described by any set of coordinates, especially if those coordinates are changing from location to location.
What’s so Fictitious about Fictitious Forces?
Freshmen physics students are routinely admonished for talking about “centrifugal” forces (rather than centripetal) when describing circular motion, usually with the statement that centrifugal forces are fictitious—only appearing to be forces when the observer is in the rotating frame. The same is said for the Coriolis force. Yet for being such a “fictitious” force, the Coriolis effect is what drives hurricanes and the colossal devastation they cause. Try telling a hurricane victim that they were wiped out by a fictitious force! Looking closer at the Coriolis force is a good way of understanding how taking derivatives of vectors leads to effects often called “fictitious”, yet it opens the door on some of the simpler techniques in the topic of differential geometry.
To start, consider a vector in a uniformly rotating frame. Such a frame is called “non-inertial” because of the angular acceleration associated with the uniform rotation. For an observer in the rotating frame, vectors are attached to the frame, like pinning them down to the coordinate axes, but the axes themselves are changing in time (when viewed by an external observer in a fixed frame). If the primed frame is the external fixed frame, then a position in the rotating frame is
where R is the position vector of the origin of the rotating frame and r is the position in the rotating frame relative to the origin. The funny notation on the last term is called in Physics-ese a “contraction”, but it is just a simple inner product, or dot product, between the components of the position vector and the basis vectors. A basis vector is like the old-fashioned i, j, k of vector calculus indicating unit basis vectors pointing along the x, y and z axes. The format with one index up and one down in the product means to do a summation. This is known as the Einstein summation convention, so it’s just
Taking the time derivative of the position vector gives
and by the chain rule this must be
where the last term has a time derivative of a basis vector. This is non-zero because in the rotating frame the basis vector is changing orientation in time. This term is non-inertial and can be shown fairly easily (see IMD2 Chapter 1) to be
which is where the centrifugal force comes from. This shows how a so-called fictitious force arises from a derivative of a basis vector. The fascinating point of this is that in GR, the force of gravity arises in almost the same way, making it tempting to call gravity a fictitious force, despite the fact that it can kill you if you fall out a window. The question is, how does gravity arise from simple derivatives of basis vectors?
The Geodesic Equation
To teach GR to undergraduates, you cannot expect them to have taken a course in differential geometry, because most of them just don’t have the time in their schedule to take such an advanced mathematics course. In addition, there is far more taught in differential geometry than is needed to make progress in GR. So the simple approach is to teach what they need to understand GR with as little differential geometry as possible, expressed with clear English-to-Physics-ese translations.
For example, consider the partial derivative of a vector expressed in index notation as
Taking the partial derivative, using the always-necessary chain rule, is
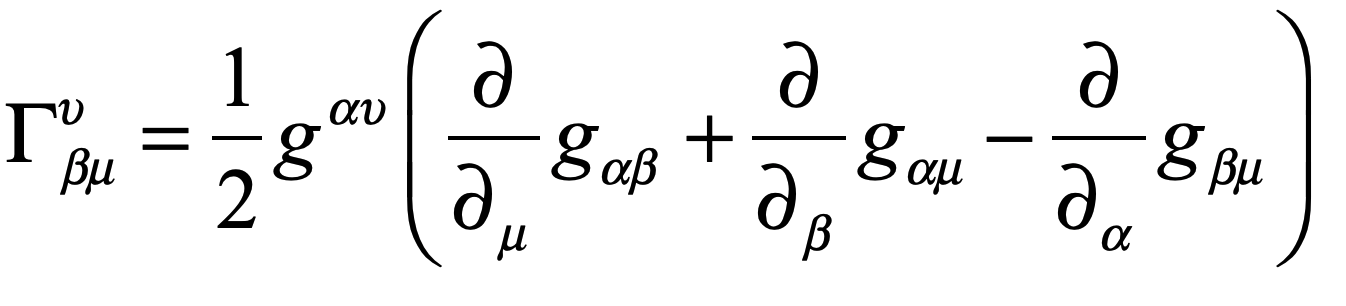
where the second term is just like the extra time-derivative term that showed up in the derivation of the Coriolis force. The basis vector of a general coordinate system may change size and orientation as a function of position, so this derivative is not in general zero. Because the derivative of a basis vector is so central to the ideas of GR, they are given their own symbol. It is
where the new “Gamma” symbol is called a Christoffel symbol. It has lots of indexes, both up and down, which looks daunting, but it can be interpreted as the beta-th derivative of the alpha-th component of the mu-th basis vector. The partial derivative is now
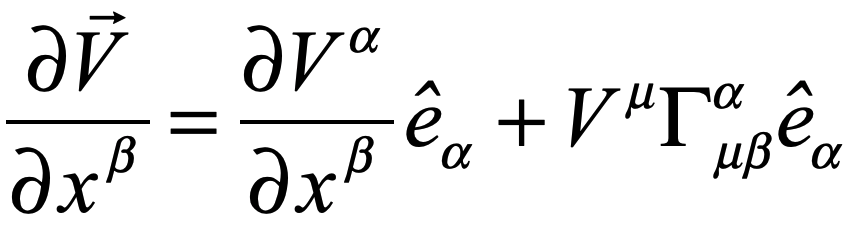
For those of you who noticed that some of the indexes flipped from alpha to mu and vice versa, you’re right! Swapping repeated indexes in these “contractions” is allowed and helps make derivations a lot easier, which is probably why Einstein invented this notation in the first place.
The last step in taking a partial derivative of a vector is to isolate a single vector component Va as
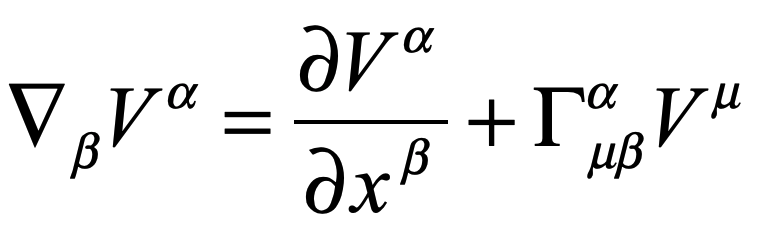
where a new symbol, the del-operator has been introduced. This del-operator is known as the “covariant derivative” of the vector component. Again, forget the “covariant” part and just think “gradient”. Namely, taking the gradient of a vector in general includes changes in the vector component as well as changes in the basis vector.
Now that you know how to take the partial derivative of a vector using Christoffel symbols, you are ready to generate the central equation of General Relativity: The geodesic equation.
Everyone knows that a geodesic is the shortest path between two points, like a great circle route on the globe. But it also turns out to be the straightest path, which can be derived using an idea known as “parallel transport”. To start, consider transporting a vector along a curve in a flat metric. The equation describing this process is
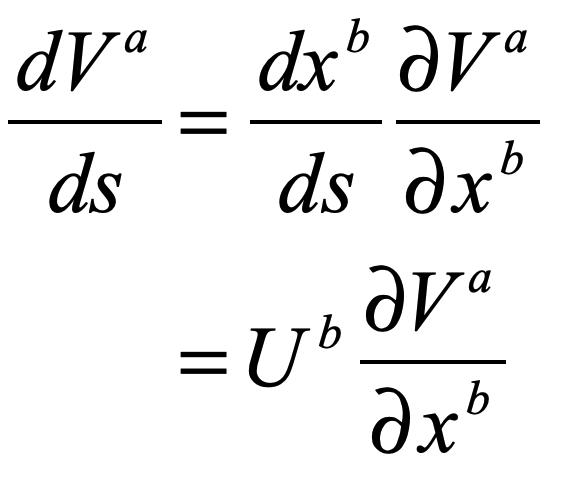
Because the Christoffel symbols are zero in a flat space, the covariant derivative and the partial derivative are equal, giving
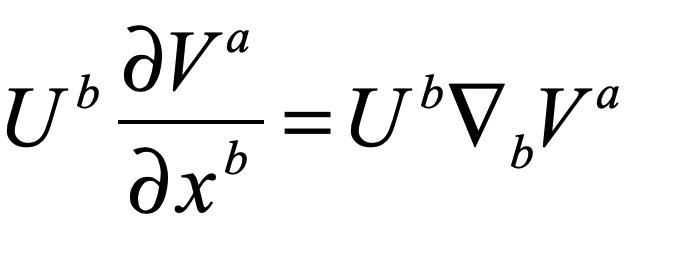
If the vector is transported parallel to itself, then there is no change in V along the curve, so that

Finally, recognizing
and substituting this in gives
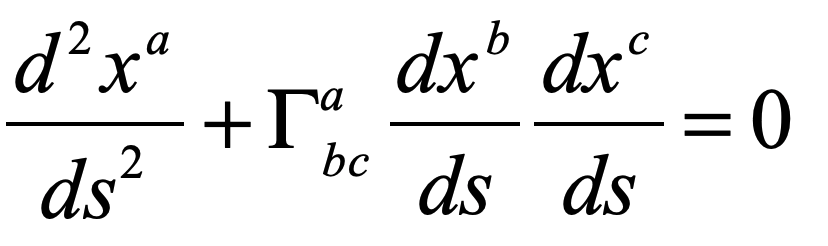
This is the geodesic equation!

Putting this in the standard form of a flow gives the geodesic flow equations
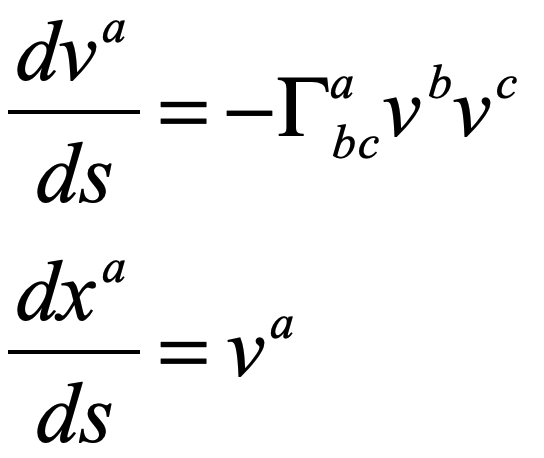
The flow defines an ordinary differential equation that defines a curve that carries its own tangent vector onto itself. The curve is parameterized by a parameter s that can be identified with path length. It is the central equation of GR, because it describes how an object follows a force-free trajectory, like free fall, in any general coordinate system. It can be applied to simple problems like the Coriolis effect, or it can be applied to seemingly difficult problems, like the trajectory of a light path past a black hole.
The Metric Connection
Arriving at the geodesic equation is a major accomplishment, and you have done it in just a few pages of this blog. But there is still an important missing piece before we are doing General Relativity of gravitation. We need to connect the Christoffel symbol in the geodesic equation to the warping of space-time around a gravitating object.
The warping of space-time by matter and energy is another central piece of GR and is often the central focus of a graduate-level course on the subject. This part of GR does have its challenges leading up to Einstein’s Field Equations that explain how matter makes space bend. But at an undergraduate level, it is sufficient to just describe the bent coordinates as a starting point, then use the geodesic equation to solve for so many of the cool effects of black holes.
So, stating the way that matter bends space-time is as simple as writing down the length element for the Schwarzschild metric of a spherical gravitating mass as
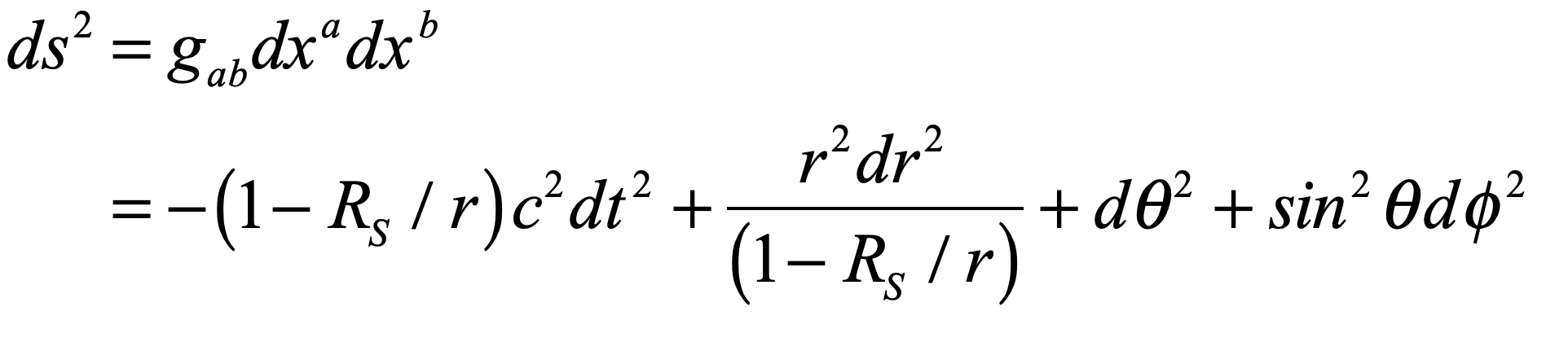
where RS = GM/c2 is the Schwarzschild radius. (The connection between the metric tensor gab and the Christoffel symbol can be found in Chapter 11 of IMD2.) It takes only a little work to find that
This means that if we have the Schwarzschild metric, all we have to do is take first partial derivatives and we will arrive at the Christoffel symbols that go into the geodesic equation. Solving for any type of force-free trajectory is then just a matter of solving ODEs with initial conditions (performed routinely with numerical ODE solvers in Python, Matlab, Mathematica, etc.).
The first problem we will tackle using the geodesic equation is the deflection of light by gravity. This is the quintessential problem of GR because there cannot be any gravitational force on a photon, yet the path of the photon surely must bend in the presence of gravity. This is possible through the geodesic motion of the photon through warped space time. I’ll take up this problem in my next Blog.
This Blog Post is a Companion to the undergraduate physics textbook Modern Dynamics: Chaos, Networks, Space and Time, 2nd ed. (Oxford, 2019) introducing Lagrangians and Hamiltonians, chaos theory, complex systems, synchronization, neural networks, econophysics and Special and General Relativity.


[…] How to Teach General Relativity to Undergraduate Physics Majors […]
LikeLike
[…] How to Teach General Relativity to Undergraduate Physics Majors […]
LikeLike
[…] How to Teach General Relativity to Undergraduate Physics Majors […]
LikeLike
[…] How to Teach General Relativity to Undergraduate Physics Majors […]
LikeLike