In an ironic twist of the history of physics, Karl Schwarzschild’s fame has eclipsed his own legacy. When asked who was Karl Schwarzschild (1873 – 1916), you would probably say he’s the guy who solved Einstein’s Field Equations of General Relativity and discovered the radius of black holes. You may also know that he accomplished this Herculean feat while dying slowly behind the German lines on the Eastern Front in WWI. But asked what else he did, and you would probably come up blank. Yet Schwarzschild was one of the most wide-ranging physicists at the turn of the 20th century, which is saying something, because it places him into the same pantheon as Planck, Lorentz, Poincaré and Einstein. Let’s take a look at the part of his career that hides in the shadow of his own radius.
A Radius of Interest
Karl Schwarzschild was born in Frankfurt, Germany, shortly after the Franco-Prussian war thrust Prussia onto the world stage as a major political force in Europe. His family were Jewish merchants of longstanding reputation in the city, and Schwarzschild’s childhood was spent in the vibrant Jewish community. One of his father’s friends was a professor at a university in Frankfurt, whose son, Paul Epstein (1871 – 1939), became a close friend of Karl’s at the Gymnasium. Schwarzshild and Epstein would partially shadow each other’s careers despite the fact that Schwarzschild became an astronomer while Epstein became a famous mathematician and number theorist. This was in part because Schwarzschild had large radius of interests that spanned the breadth of current mathematics and science, practicing both experiments and theory.
Schwarzschild’s application of the Hamiltonian formalism for quantum systems set the stage for the later adoption of Hamiltonian methods in quantum mechanics. He came dangerously close to stating the uncertainty principle that catapulted Heisenberg to fame.
By the time Schwarzschild was sixteen, he had taught himself the mathematics of celestial mechanics to such depth that he published two papers on the orbits of binary stars. He also became fascinated in astronomy and purchased lenses and other materials to construct his own telescope. His interests were helped along by Epstein, two years older and whose father had his own private observatory. When Epstein went to study at the University of Strasbourg (then part of the German Federation) Schwarzschild followed him. But Schwarzschild’s main interest in astronomy diverged from Epstein’s main interest in mathematics, and Schwarzschild transferred to the University of Munich where he studied under Hugo von Seeliger (1849 – 1924), the premier German astronomer of his day. Epstein remained at Strasbourg where he studied under Bruno Christoffel (1829 – 1900) and eventually became a professor, but he was forced to relinquish the post when Strasbourg was ceded to France after WWI.
The Birth of Stellar Interferometry
Until the Hubble space telescope was launched in 1990 no star had ever been resolved as a direct image. Within a year of its launch, using its spectacular resolving power, the Hubble optics resolved—just barely—the red supergiant Betelgeuse. No other star (other than the Sun) is close enough or big enough to image the stellar disk, even for the Hubble far above our atmosphere. The reason is that the diameter of the optical lenses and mirrors of the Hubble—as big as they are at 2.4 meter diameter—still produce a diffraction pattern that smears the image so that stars cannot be resolved. Yet information on the size of a distant object is encoded as phase in the light waves that are emitted from the object, and this phase information is accessible to interferometry.
The first physicist who truly grasped the power of optical interferometry and who understood how to design the first interferometric metrology systems was the French physicist Armand Hippolyte Louis Fizeau (1819 – 1896). Fizeau became interested in the properties of light when he collaborated with his friend Léon Foucault (1819–1868) on early uses of photography. The two then embarked on a measurement of the speed of light but had a falling out before the experiment could be finished, and both continued the pursuit independently. Fizeau achieved the first measurement using a toothed wheel rotating rapidly [1], while Foucault came in second using a more versatile system with a spinning mirror [2]. Yet Fizeau surpassed Foucault in optical design and became an expert in interference effects. Interference apparatus had been developed earlier by Augustin Fresnel (the Fresnel bi-prism 1819), Humphrey Lloyd (Lloyd’s mirror 1834) and Jules Jamin (Jamin’s interferential refractor 1856). They had found ways of redirecting light using refraction and reflection to cause interference fringes. But Fizeau was one of the first to recognize that each emitting region of a light source was coherent with itself, and he used this insight and the use of lenses to design the first interferometer.
Fizeau’s interferometer used a lens with a with a tight focal spot masked off by an opaque screen with two open slits. When the masked lens device was focused on an intense light source it produced two parallel pencils of light that were mutually coherent but spatially separated. Fizeau used this apparatus to measure the speed of light in moving water in 1859 [3].

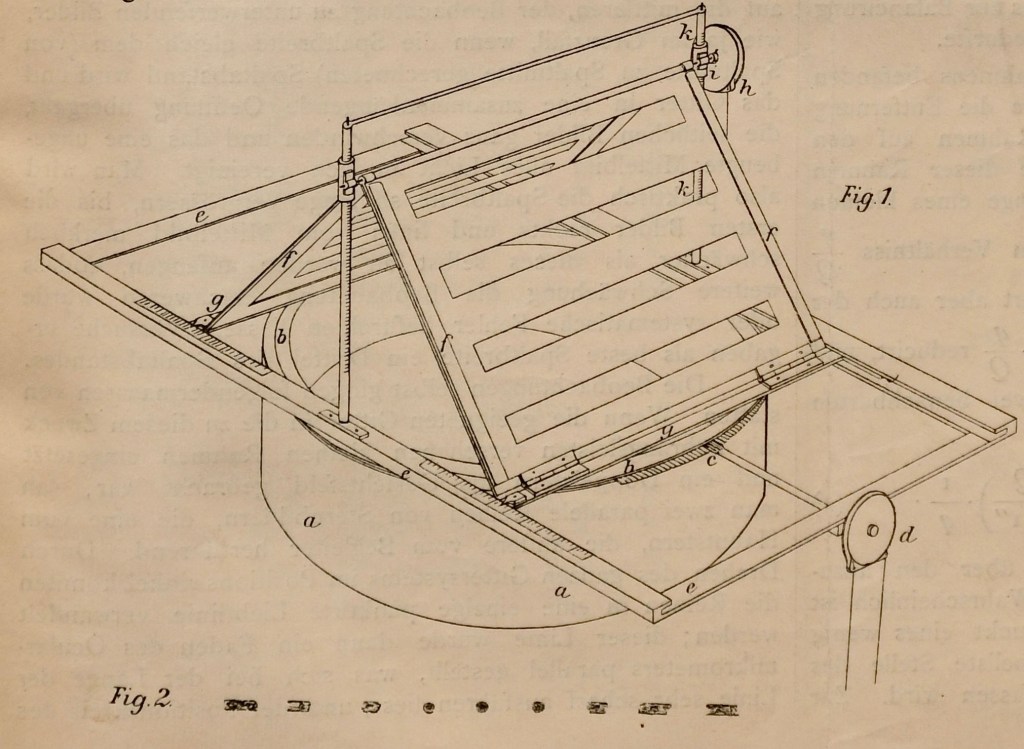
The working principle of the Fizeau refractometer is shown in Fig. 1. The light source is at the bottom, and it is reflected by the partially-silvered beam splitter to pass through the lens and the mask containing two slits. (Only the light paths that pass through the double-slit mask on the lens are shown in the figure.) The slits produce two pencils of mutually coherent light that pass through a system (in the famous Fizeau ether drag experiment it was along two tubes of moving water) and are returned through the same slits, and they intersect at the view port where they produce interference fringes. The fringe spacing is set by the separation of the two slits in the mask. The Rayleigh region of the lens defines a region of spatial coherence even for a so-called “incoherent” source. Therefore, this apparatus, by use of the lens, could convert an incoherent light source into a coherent probe to test the refractive index of test materials, which is why it was called a refractometer.
Fizeau became adept at thinking of alternative optical designs of his refractometer and alternative applications. In an address to the French Physical Society in 1868 he suggested that the double-slit mask could be used on a telescope to determine sizes of distant astronomical objects [4]. There were several subsequent attempts to use Fizeau’s configuration in astronomical observations, but none were conclusive and hence were not widely known.
An optical configuration and astronomical application that was very similar to Fizeau’s idea was proposed by Albert Michelson in 1890 [5]. He built the apparatus and used it to successfully measure the size of several moons of Jupiter [6]. The configuration of the Michelson stellar interferometer is shown in Fig. 2. Light from a distant star passes through two slits in the mask in front of the collecting optics of a telescope. When the two pencils of light intersect at the view port, they produce interference fringes. Because of the finite size of the stellar source, the fringes are partially washed out. By adjusting the slit separation, a certain separation can be found where the fringes completely wash out. The size of the star is then related to the separation of the slits for which the fringe visibility vanishes. This simple principle allows this type of stellar interferometry to measure the size of stars that are large and relatively close to Earth. However, if stars are too far away even this approach cannot be used to measure their sizes because telescopes aren’t big enough. This limitation is currently being bypassed by the use of long-baseline optical interferometers.

One of the open questions in the history of interferometry is whether Michelson was aware of Fizeau’s proposal for the stellar interferometer made in 1868. Michelson was well aware of Fizeau’s published research and acknowledged him as a direct inspiration of his own work in interference effects. But Michelson also was unaware of the undercurrents in the French school of optical interference. When he visited Paris in 1881, he met with many of the leading figures in this school (including Lippmann and Cornu), but there is no mention or any evidence that he met with Fizeau. By this time Fizeau’s wife had passed away, and Fizeau spent most of his time in seclusion at his home outside Paris. Therefore, it is unlikely that he would have been present during Michelson’s visit. Because Michelson viewed Fizeau with such awe and respect, if he had met him, he most certainly would have mentioned it. Therefore, Michelson’s invention of the stellar interferometer can be considered with some confidence to be a case of independent discovery. It is perhaps not surprising that he hit on the same idea that Fizeau had in 1868, because Michelson was one of the few physicists who understood coherence and interference at the same depth as Fizeau.
Schwarzschild’s Stellar Interferometer
The physics of the Michelson stellar interferometer is very similar to the physics of Young’s double slit experiment. The two slits in the aperture mask of the telescope objective act to produce a simple sinusoidal interference pattern at the image plane of the optical system. The size of the stellar diameter is determined by using the wash-out effect of the fringes caused by the finite stellar size. However, it is well known to physicists who work with diffraction gratings that a multiple-slit interference pattern has a much greater resolving power than a simple double slit.
This realization must have hit von Seeliger and Schwarzschild, working together at Munich, when they saw the publication of Michelson’s theoretical analysis of his stellar interferometer in 1890, followed by his use of the apparatus to measure the size of Jupiter’s moons. Schwarzschild and von Seeliger realized that by replacing the double-slit mask with a multiple-slit mask, the widths of the interference maxima would be much narrower. Such a diffraction mask on a telescope would cause a star to produce a multiple set of images on the image plane of the telescope associated with the multiple diffraction orders. More interestingly, if the target were a binary star, the diffraction would produce two sets of diffraction maxima—a double image! If the “finesse” of the grating is high enough, the binary star separation could be resolved as a doublet in the diffraction pattern at the image, and the separation could be measured, giving the angular separation of the two stars of the binary system. Such an approach to the binary separation would be a direct measurement, which was a distinct and clever improvement over the indirect Michelson configuration that required finding the extinction of the fringe visibility.
Schwarzschild enlisted the help of a fine German instrument maker to create a multiple slit system that had an adjustable slit separation. The device is shown in Fig. 3 from Schwarzschild’s 1896 publication on the use of the stellar interferometer to measure the separation of binary stars [7]. The device is ingenious. By rotating the chain around the gear on the right-hand side of the apparatus, the two metal plates with four slits could be raised or lowered, cause the projection onto the objective plane to have variable slit spacings. In the operation of the telescope, the changing height of the slits does not matter, because they are near a conjugate optical plane (the entrance pupil) of the optical system. Using this adjustable multiple slit system, Schwarzschild (and two colleagues he enlisted) made multiple observations of well-known binary star systems, and they calculated the star separations. Several of their published results are shown in Fig. 4.

Schwarzschild’s publication demonstrated one of the very first uses of stellar interferometry—well before Michelson himself used his own configuration to measure the diameter of Betelgeuse in 1920. Schwarzschild’s major achievement was performed before he had received his doctorate, on a topic orthogonal to his dissertation topic. Yet this fact is virtually unknown to the broader physics community outside of astronomy. If he had not become so famous later for his solution of Einstein’s field equations, Schwarzschild nonetheless might have been famous for his early contributions to stellar interferometry. But even this was not the end of his unique contributions to physics.
Adiabatic Physics
As Schwarzschild worked for his doctorate under von Seeliger, his dissertation topic was on new theories by Henri Poincaré (1854 – 1912) on celestial mechanics. Poincaré had made a big splash on the international stage with the publication of his prize-winning memoire in 1890 on the three-body problem. This is the publication where Poincaré first described what would later become known as chaos theory. The memoire was followed by his volumes on “New Methods in Celestial Mechanics” published between 1892 and 1899. Poincaré’s work on celestial mechanics was based on his earlier work on the theory of dynamical systems where he discovered important invariant theorems, such as Liouville’s theorem on the conservation of phase space volume. Schwarzshild applied Poincaré’s theorems to problems in celestial orbits. He took his doctorate in 1896 and received a post at an astronomical observatory outside Vienna.
While at Vienna, Schwarzschild performed his most important sustained contributions to the science of astronomy. Astronomical observations had been dominated for centuries by the human eye, but photographic techniques had been making steady inroads since the time of Hermann Carl Vogel (1841 – 1907) in the 1880’s at the Potsdam observatory. Photographic plates were used primarily to record star positions but were known to be unreliable for recording stellar intensities. Schwarzschild developed a “out-of-focus” technique that blurred the star’s image, while making it larger and easier to measure the density of the exposed and developed photographic emulsions. In this way, Schwarzschild measured the magnitudes of 367 stars. Two of these stars had variable magnitudes that he was able to record and track. Schwarzschild correctly explained the intensity variation caused by steady oscillations in heating and cooling of the stellar atmosphere. This work established the properties of these Cepheid variables which would become some of the most important “standard candles” for the measurement of cosmological distances. Based on the importance of this work, Schwarzschild returned to Munich as a teacher in 1899 and subsequently was appointed in 1901 as the director of the observatory at Göttingen established by Gauss eighty years earlier.
Schwarzschild’s years at Göttingen brought him into contact with some of the greatest mathematicians and physicists of that era. The mathematicians included Felix Klein, David Hilbert and Hermann Minkowski. The physicists included von Laue, a student of Woldemar Voigt. This period was one of several “golden ages” of Göttingen. The first golden age was the time of Gauss and Riemann in the mid-1800’s. The second golden age, when Schwarzschild was present, began when Felix Klein arrived at Göttingen and attracted the top mathematicians of the time. The third golden age of Göttingen was the time of Born and Jordan and Heisenberg at the birth of quantum mechanics in the mid 1920’s.
In 1906, the Austrian Physicist Paul Ehrenfest, freshly out of his PhD under the supervision of Boltzmann, arrived at Göttingen only weeks before Boltzmann took his own life. Felix Klein at Göttingen had been relying on Boltzmann to provide a comprehensive review of statistical mechanics for the Mathematical Encyclopedia, so he now entrusted this project to the young Ehrenfest. It was a monumental task, which was to take him and his physicist wife Tatyanya nearly five years to complete. Part of the delay was the desire by the Ehrenfests to close some open problems that remained in Boltzmann’s work. One of these was a mechanical theorem of Boltzmann’s that identified properties of statistical mechanical systems that remained unaltered through a very slow change in system parameters. These properties would later be called adiabatic invariants by Einstein.
Ehrenfest recognized that Wien’s displacement law, which had been a guiding light for Planck and his theory of black body radiation, had originally been derived by Wien using classical principles related to slow changes in the volume of a cavity. Ehrenfest was struck by the fact that such slow changes would not induce changes in the quantum numbers of the quantized states, and hence that the quantum numbers must be adiabatic invariants of the black body system. This not only explained why Wien’s displacement law continued to hold under quantum as well as classical considerations, but it also explained why Planck’s quantization of the energy of his simple oscillators was the only possible choice. For a classical harmonic oscillator, the ratio of the energy of oscillation to the frequency of oscillation is an adiabatic invariant, which is immediately recognized as Planck’s quantum condition .
Ehrenfest published his observations in 1913 [8], the same year that Bohr published his theory of the hydrogen atom, so Ehrenfest immediately applied the theory of adiabatic invariants to Bohr’s model and discovered that the quantum condition for the quantized energy levels was again the adiabatic invariants of the electron orbits, and not merely a consequence of integer multiples of angular momentum, which had seemed somewhat ad hoc.
After eight exciting years at Göttingen, Schwarzschild was offered the position at the Potsdam Observatory in 1909 upon the retirement from that post of the famous German astronomer Carl Vogel who had made the first confirmed measurements of the optical Doppler effect. Schwarzschild accepted and moved to Potsdam with a new family. His son Martin Schwarzschild would follow him into his profession, becoming a famous astronomer at Princeton University and a theorist on stellar structure. At the outbreak of WWI, Schwarzschild joined the German army out of a sense of patriotism. Because of his advanced education he was made an officer of artillery with the job to calculate artillery trajectories, and after a short time on the Western Front in Belgium was transferred to the Eastern Front in Russia. Though he was not in the trenches, he was in the midst of the chaos to the rear of the front. Despite this situation, he found time to pursue his science through the year 1915.
Schwarzschild was intrigued by Ehrenfest’s paper on adiabatic invariants and their similarity to several of the invariant theorems of Poincaré that he had studied for his doctorate. Up until this time, mechanics had been mostly pursued through the Lagrangian formalism which could easily handle generalized forces associated with dissipation. But celestial mechanics are conservative systems for which the Hamiltonian formalism is a more natural approach. In particular, the Hamilton-Jacobi canonical transformations made it particularly easy to find pairs of generalized coordinates that had simple periodic behavior. In his published paper [9], Schwarzschild called these “Action-Angle” coordinates because one was the action integral that was well-known in the principle of “Least Action”, and the other was like an angle variable that changed steadily in time (see Fig. 5). Action-angle coordinates have come to form the foundation of many of the properties of Hamiltonian chaos, Hamiltonian maps, and Hamiltonian tapestries.
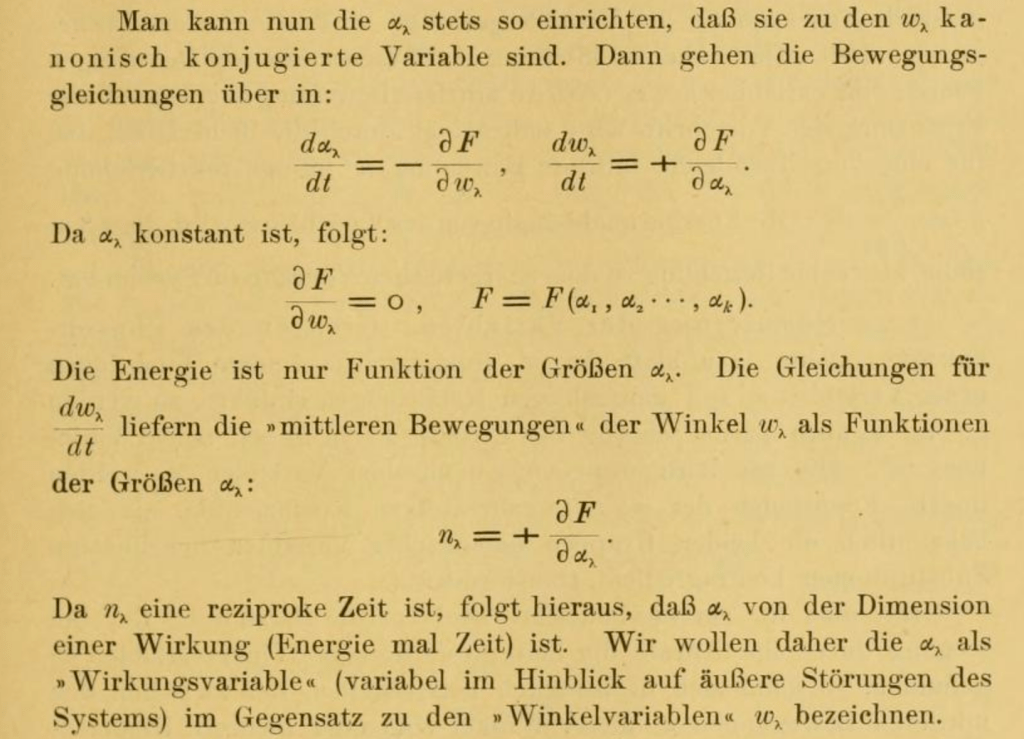
During lulls in bombardments, Schwarzschild translated the Hamilton-Jacobi methods of celestial mechanics to apply them to the new quantum mechanics of the Bohr orbits. The phrase “quantum mechanics” had not yet been coined (that would come ten years later in a paper by Max Born), but it was clear that the Bohr quantization conditions were a new type of mechanics. The periodicities that were inherent in the quantum systems were natural properties that could be mapped onto the periodicities of the angle variables, while Ehrenfest’s adiabatic invariants could be mapped onto the slowly varying action integrals. Schwarzschild showed that action-angle coordinates were the only allowed choice of coordinates, because they enabled the separation of the Hamilton-Jacobi equations and hence provided the correct quantization conditions for the Bohr electron orbits. Later, when Sommerfeld published his quantized elliptical orbits in 1916, the multiplicity of quantum conditions and orbits had caused concern, but Ehrenfest came to the rescue, showing that each of Sommerfeld’s quantum conditions were precisely Schwarzschild’s action-integral invariants of the classical electron dynamics [10].
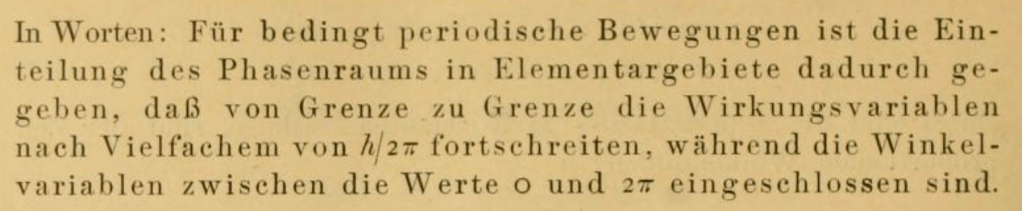
The works by Schwarzschild, and a closely-related paper that amplified his ideas published by his friend Paul Epstein several months later [11], were the first to show the power of the Hamiltonian formulation of dynamics for quantum systems, foreshadowing the future importance of Hamiltonians for quantum theory. An essential part of the Hamiltonian formalism is the concept of phase space. In his paper, Schwarzschild showed that the phase space of quantum systems was divided into small but finite elementary regions whose areas were equal to Planck’s constant h-bar (see Fig. 6). The areas were products of a small change in momentum coordinate Delta-p and a corresponding small change in position coordinate Delta-x. Therefore, the product DxDp = h-bar. This observation, made in 1915 by Schwarzschild, was only one step away from Heisenberg’s uncertainty relation, twelve years before Heisenberg discovered it. However, in 1915 Born’s probabilistic interpretation of quantum mechanics had not yet been made, nor the idea of measurement uncertainty, so Schwarzschild did not have the appropriate context in which to have made the leap to the uncertainty principle. However, by introducing the action-angle coordinates as well as the Hamiltonian formalism applied to quantum systems, with the natural structure of phase space, Schwarzschild laid the foundation for the future developments in quantum theory made by the next generation.
All Quiet on the Eastern Front
Towards the end of his second stay in Munich in 1900, prior to joining the Göttingen faculty, Schwarzschild had presented a paper at a meeting of the German Astronomical Society held in Heidelberg in August. The topic was unlike anything he had tackled before. It considered the highly theoretical question of whether the universe was non-Euclidean, and more specifically if it had curvature. He concluded from observation that if the universe were curved, the radius of curvature must be larger than between 50 light years and 2000 light years, depending on whether the geometry was hyperbolic or elliptical. Schwarzschild was working out ideas of differential geometry and applying them to the universe at large at a time when Einstein was just graduating from the ETH where he skipped his math classes and had his friend Marcel Grossmann take notes for him.
The topic of Schwarzschild’s talk tells an important story about the warping of historical perspective by the “great man” syndrome. In this case the great man is Einstein who is today given all the credit for discovering the warping of space. His development of General Relativity is often portrayed as by a lone genius in the wilderness performing a blazing act of creation out of the void. In fact, non-Euclidean geometry had been around for some time by 1900—five years before Einstein’s Special Theory and ten years before his first publications on the General Theory. Gauss had developed the idea of intrinsic curvature of a manifold fifty years earlier, amplified by Riemann. By the turn of the century alternative geometries were all the rage, and Schwarzschild considered whether there were sufficient astronomical observations to set limits on the size of curvature of the universe. But revisionist history is just as prevalent in physics as in any field, and when someone like Einstein becomes so big in the mind’s eye, his shadow makes it difficult to see all the people standing behind him.
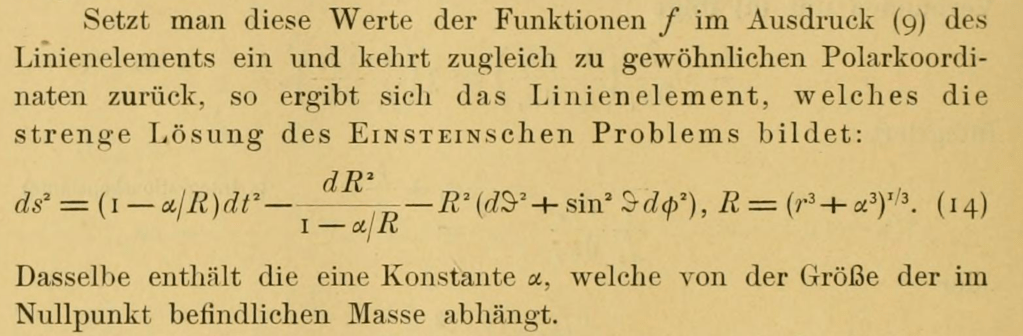
This is not meant to take away from the feat that Einstein accomplished. The General Theory of Relativity, published by Einstein in its full form in 1915 was spectacular [12]. Einstein had taken vague notions about curved spaces and had made them specific, mathematically rigorous and intimately connected with physics through the mass-energy source term in his field equations. His mathematics had gone beyond even what his mathematician friend and former collaborator Grossmann could achieve. Yet Einstein’s field equations were nonlinear tensor differential equations in which the warping of space depended on the strength of energy fields, but the configuration of those energy fields depended on the warping of space. This type of nonlinear equation is difficult to solve in general terms, and Einstein was not immediately aware of how to find the solutions to his own equations.
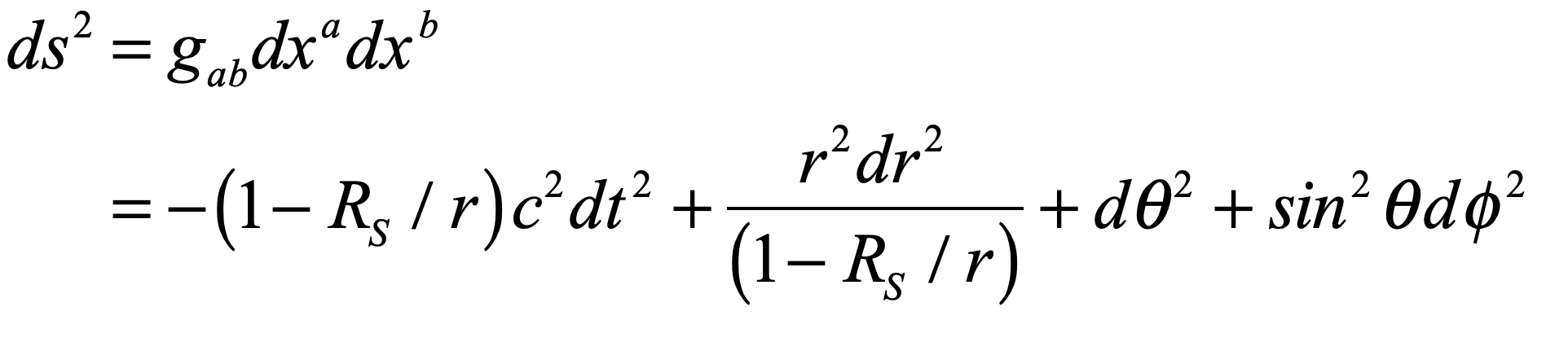
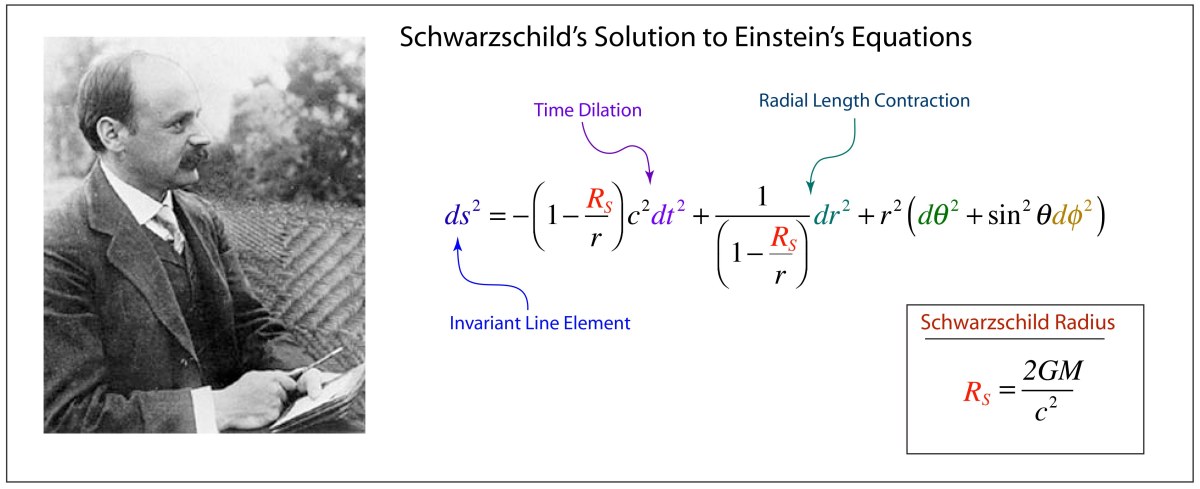
Therefore, it was no small surprise to him when he received a letter from the Eastern Front from an astronomer he barely knew who had found a solution—a simple solution (see Fig. 7) —to his field equations. Einstein probably wondered how he could have missed it, but he was generous and forwarded the letter to the Reports of the Prussian Physical Society where it was published in 1916 [13].
In the same paper, Schwarzschild used his exact solution to find the exact equation that described the precession of the perihelion of Mercury that Einstein had only calculated approximately. The dynamical equations for Mercury are shown in Fig. 8.
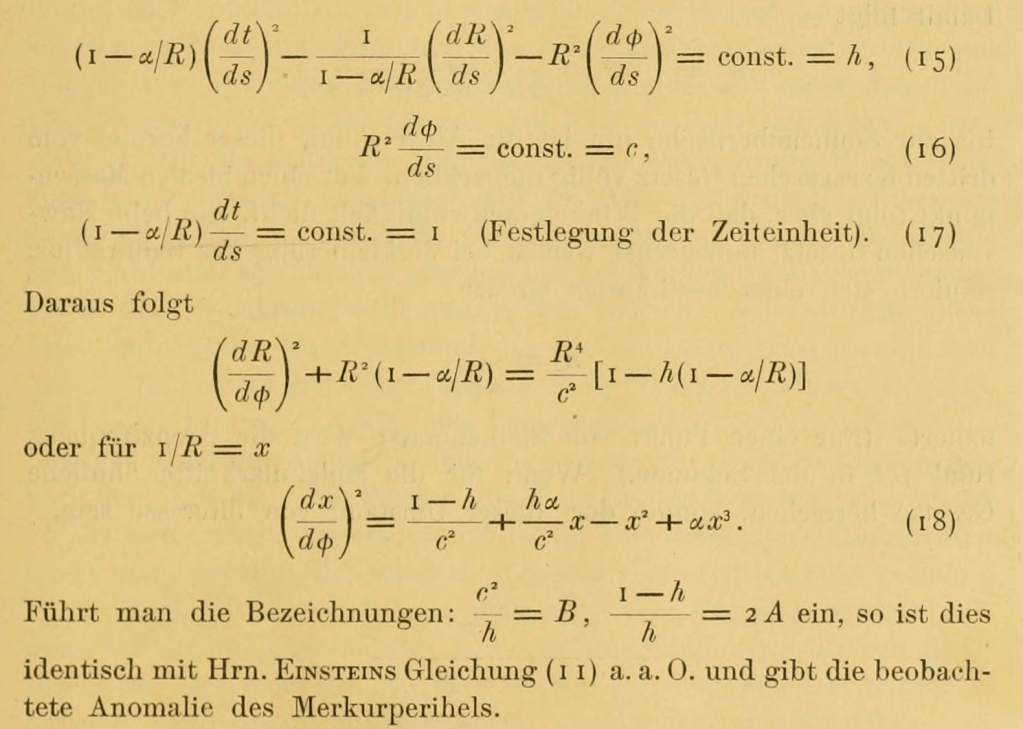
Schwarzschild’s solution to Einstein’s Field Equation of General Relativity was not a general solution, even for a point mass. He had constants of integration that could have arbitrary values, such as the characteristic length scale that Schwarzschild called “alpha”. It was David Hilbert who later expanded upon Schwarzschild’s work, giving the general solution and naming the characteristic length scale (where the metric diverges) after Schwarzschild. This is where the phrase “Schwarzschild Radius” got its name, and it stuck. In fact it stuck so well that Schwarzschild’s radius has now eclipsed much of the rest of Schwarzschild’s considerable accomplishments.
Unfortunately, Schwarzschild’s accomplishments were cut short when he contracted an autoimmune disease that may have been hereditary. It is ironic that in the carnage of the Eastern Front, it was a genetic disease that caused his death at the age of 42. He was already suffering from the effects of the disease as he worked on his last publications. He was sent home from the front to his family in Potsdam where he passed away several months later having shepherded his final two papers through the publication process. His last paper, on the action-angle variables in quantum systems , was published on the day that he died.
Schwarzschild’s Legacy
Schwarzschild’s legacy was assured when he solved Einstein’s field equations and Einstein communicated it to the world. But his hidden legacy is no less important.
Schwarzschild’s application of the Hamiltonian formalism of canonical transformations and phase space for quantum systems set the stage for the later adoption of Hamiltonian methods in quantum mechanics. He came dangerously close to stating the uncertainty principle that catapulted Heisenberg to later fame, although he could not express it in probabilistic terms because he came too early.
Schwarzschild is considered to be the greatest German astronomer of the last hundred years. This is in part based on his work at the birth of stellar interferometry and in part on his development of stellar photometry and the calibration of the Cepheid variable stars that went on to revolutionize our view of our place in the universe. Solving Einsteins field equations was just a sideline for him, a hobby to occupy his active and curious mind.
The Physics of Life, the Universe and Everyting:
Read more about the history of general relativity in Galileo Unbound from Oxford University Press

References
[1] Fizeau, H. L. (1849). “Sur une expérience relative à la vitesse de propagation de la lumière.” Comptes rendus de l’Académie des sciences 29: 90–92, 132.
[2] Foucault, J. L. (1862). “Détermination expérimentale de la vitesse de la lumière: parallaxe du Soleil.” Comptes rendus de l’Académie des sciences 55: 501–503, 792–596.
[3] Fizeau, H. (1859). “Sur les hypothèses relatives à l’éther lumineux.” Ann. Chim. Phys. Ser. 4 57: 385–404.
[4] Fizeau, H. (1868). “Prix Bordin: Rapport sur le concours de l’annee 1867.” C. R. Acad. Sci. 66: 932.
[5] Michelson, A. A. (1890). “I. On the application of interference methods to astronomical measurements.” The London, Edinburgh, and Dublin Philosophical Magazine and Journal of Science 30(182): 1-21.
[6] Michelson, A. A. (1891). “Measurement of Jupiter’s Satellites by Interference.” Nature 45(1155): 160-161.
[7] Schwarzschild, K. (1896). “Über messung von doppelsternen durch interferenzen.” Astron. Nachr. 3335: 139.
[8] P. Ehrenfest, “Een mechanische theorema van Boltzmann en zijne betrekking tot de quanta theorie (A mechanical theorem of Boltzmann and its relation to the theory of energy quanta),” Verslag van de Gewoge Vergaderingen der Wis-en Natuurkungige Afdeeling, vol. 22, pp. 586-593, 1913.
[9] Schwarzschild, K. (1916). “Quantum hypothesis.” Sitzungsberichte Der Koniglich Preussischen Akademie Der Wissenschaften: 548-568.
[10] P. Ehrenfest, “Adiabatic invariables and quantum theory,” Annalen Der Physik, vol. 51, pp. 327-352, Oct 1916.
[11] Epstein, P. S. (1916). “The quantum theory.” Annalen Der Physik 51(18): 168-188.
[12] Einstein, A. (1915). “On the general theory of relativity.” Sitzungsberichte Der Koniglich Preussischen Akademie Der Wissenschaften: 778-786.
[13] Schwarzschild, K. (1916). “Über das Gravitationsfeld eines Massenpunktes nach der Einstein’schen Theorie.” Sitzungsberichte der Königlich-Preussischen Akademie der Wissenschaften: 189.