

In the study of mechanics, the physics student moves through several stages in their education. The first stage is the Newtonian physics of trajectories and energy and momentum conservation—there are no surprises there. The second stage takes them to Lagrangians and Hamiltonians—here there are some surprises, especially for rigid body rotations. Yet even at this stage, most problems have analytical solutions, and most of those solutions are exact.
Any street busker can tell you that an equally good (and more interesting) equilibrium point of a simple pendulum is when the bob is at the top.
It is only at the third stage that physics starts to get really interesting, and when surprising results with important ramifications emerge. This stage is nonlinear physics. Most nonlinear problems have no exact analytical solutions, but there are regimes where analytical approximations not only are possible but provide intuitive insights. One of the best examples of this third stage is the dynamic equilibrium of Kapitsa’s up-side-down pendulum.
Piotr Kapitsa
Piotr Kapitsa (1894 – 1984) was a physicist who received the Nobel Prize in physics in 1978 for his discovery in 1937 of superfluidity in liquid helium. (He shared the 1978 prize with Penzias and Wilson who had discovered the cosmic microwave background.) Superfluidity is a low-temperature hydrodynamic property of superfluids that shares some aspects in common with superconductivity. Kapitsa published his results in Nature in 1938 in the same issue as a paper by John Allen and Don Misener of Cambridge, but Kapitsa had submitted his paper 19 days before Allen and Misener and so got priority (and the Nobel).
During his career Kapitsa was a leading force in Russian physics, surviving Stalin’s great purge through force of character, and helping to establish the now-famous Moscow Institute of Physics and Technology. However, surviving Stalin did not always mean surviving with freedom, and around 1950 Kapitsa was under effective house arrest because of his unwillingness to toe the party line.
In his enforced free time, to while away the hours, Kapitsa developed an ingenious analytical approach to the problem of dynamic equilibrium. His toy example was the driven inverted pendulum. It is surprising how many great works have emerged from the time freed up by house arrest: Galileo finally had time to write his “Two New Sciences” after his run-in with the Inquisition, and Fresnel was free to develop his theory of diffraction after he ill-advisedly joined a militia to support the Bourbon king during Napoleon’s return. (In our own time, with so many physicists in lock-down and working from home, it will be interesting to see what great theory emerges from the pandemic.)
Stability in the Inverted Driven Pendulum
The only stable static equilibrium of the simple pendulum is when the pendulum bob is at its lowest point. However, any street busker can tell you that an equally good (and more interesting) equilibrium point is when the bob is at the top. The caveat is that this “inverted” equilibrium of the pendulum requires active stabilization.
If the inverted pendulum is a simple physical pendulum, like a meter stick that you balance on the tip of your finger, you know that you need to nudge the stick gently and continuously this way and that with your finger, in response to the tipping stick, to keep it upright. It’s an easy trick, and almost everyone masters it as a child. With the human as the drive force, this is an example of a closed-loop control system. The tipping stick is observed visually by the human, and the finger position is adjusted to compensate for the tip. On the other hand, one might be interested to find an “open-loop” system that does not require active feedback or even an operator. In 1908, Andrew Stephenson suggested that induced stability could be achieved by the inverted pendulum if a drive force of sufficiently high frequency were applied [1]. But the proof of the stability remained elusive until Kapitsa followed Stephenson’s suggestion by solving the problem through a separation of time scales [2].
The Method of Separation of Time Scales
The driven inverted pendulum has the dynamical equation

where w0 is the natural angular frequency of small-amplitude oscillations, a is a drive amplitude (with units of frequency) and w is the drive angular frequency that is assumed to be much larger than the natural frequency. The essential assumption that allows the problem to be separate according to widely separated timescales is that the angular displacement has a slow contribution that changes on the time scale of the natural frequency, and a fast contribution that changes on the time scale of the much higher drive frequency. The assumed solution then looks like
This is inserted into the dynamical equation to yield

where we have used the approximation
So far this is simple. The next step is the key step. It assumes that the dynamical equation should also separate into fast and slow contributions. But the last term of the sin q expansion has a product of fast and slow components. The key insight is that a time average can be used to average over the fast contribution. The separation of the dynamical equation is then

where the time average of the fast variables is only needed on the first line. The second line is a simple driven harmonic oscillator with a natural frequency that depends on cos qslow and a driving amplitude that depends on sin qslow. The classic solution to the second line for qfast is
This solution can then be inserted into the first line to yield

This describes a pendulum under an effective potential (for high drive frequency and no damping)
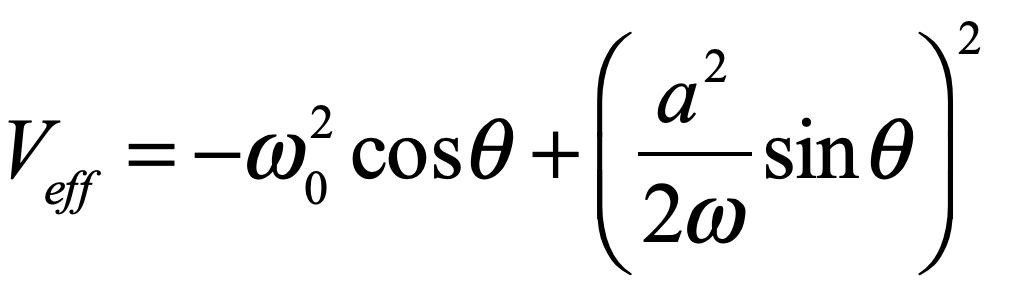
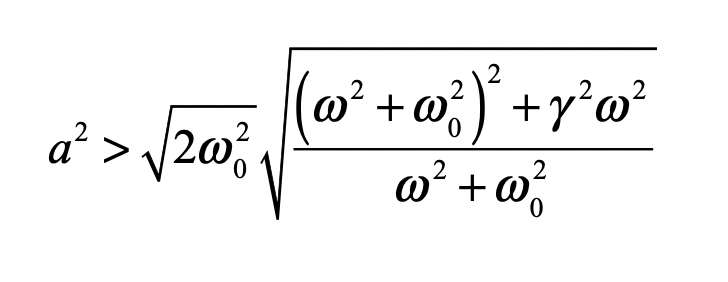
The first term is unstable at the inverted position, but the second term is actually a restoring force. If the second term is stronger than the first, then a dynamic equilibrium can be achieved. This occurs when the driving amplitude is larger than a threshold value
The effective potential for increasing drive amplitude looks like
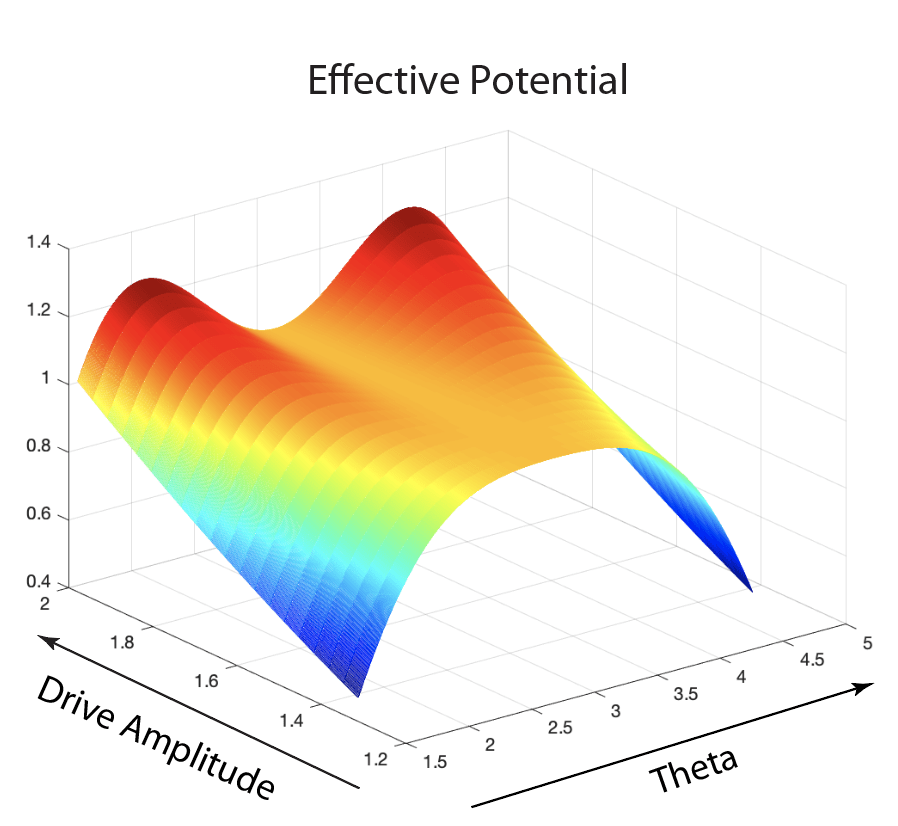
When the drive amplitude is larger than sqrt(2), a slight dip forms in the unstable potential. The dip increases with increasing drive amplitude, as does the oscillation frequency of the effective potential.
Python Program: PenInverted.py
(Python code on GitHub.)
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
PenInverted.py
Created on Friday Sept 11 06:03:32 2020
@author: nolte
D. D. Nolte, Introduction to Modern Dynamics: Chaos, Networks, Space and Time, 2nd ed. (Oxford,2019)
"""
import numpy as np
from scipy import integrate
from matplotlib import pyplot as plt
plt.close('all')
print(' ')
print('PenInverted.py')
F = 133.5 # 30 to 140 (133.5)
delt = 0.000 # 0.000 to 0.01
w = 20 # 20
def flow_deriv(x_y_z,tspan):
x, y, z = x_y_z
a = y
b = -(1 + F*np.cos(z))*np.sin(x) - delt*y
c = w
return[a,b,c]
T = 2*np.pi/w
x0 = np.pi+0.3
v0 = 0.00
z0 = 0
x_y_z = [x0, v0, z0]
# Solve for the trajectories
t = np.linspace(0, 2000, 200000)
x_t = integrate.odeint(flow_deriv, x_y_z, t)
siztmp = np.shape(x_t)
siz = siztmp[0]
#y1 = np.mod(x_t[:,0]-np.pi,2*np.pi)-np.pi
y1 = x_t[:,0]
y2 = x_t[:,1]
y3 = x_t[:,2]
plt.figure(1)
lines = plt.plot(t[0:2000],x_t[0:2000,0]/np.pi)
plt.setp(lines, linewidth=0.5)
plt.show()
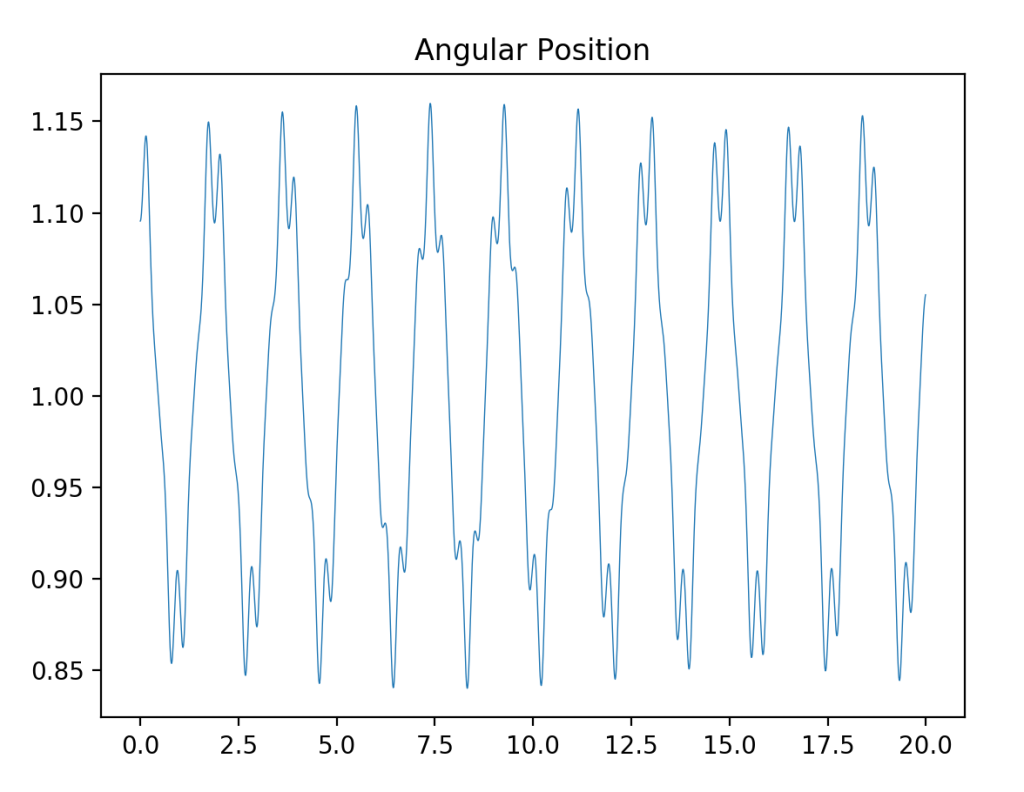
plt.title('Angular Position')
plt.figure(2)
lines = plt.plot(t[0:1000],y2[0:1000])
plt.setp(lines, linewidth=0.5)
plt.show()
plt.title('Speed')
repnum = 5000
px = np.zeros(shape=(2*repnum,))
xvar = np.zeros(shape=(2*repnum,))
cnt = -1
testwt = np.mod(t,T)-0.5*T;
last = testwt[1]
for loop in range(2,siz-1):
if (last < 0)and(testwt[loop] > 0):
cnt = cnt+1
del1 = -testwt[loop-1]/(testwt[loop] - testwt[loop-1])
px[cnt] = (y2[loop]-y2[loop-1])*del1 + y2[loop-1]
xvar[cnt] = (y1[loop]-y1[loop-1])*del1 + y1[loop-1]
last = testwt[loop]
else:
last = testwt[loop]
plt.figure(3)
lines = plt.plot(xvar[0:5000],px[0:5000],'ko',ms=1)
plt.show()
plt.title('First Return Map')
plt.figure(4)
lines = plt.plot(x_t[0:1000,0]/np.pi,y2[0:1000])
plt.setp(lines, linewidth=0.5)
plt.show()
plt.title('Phase Space')
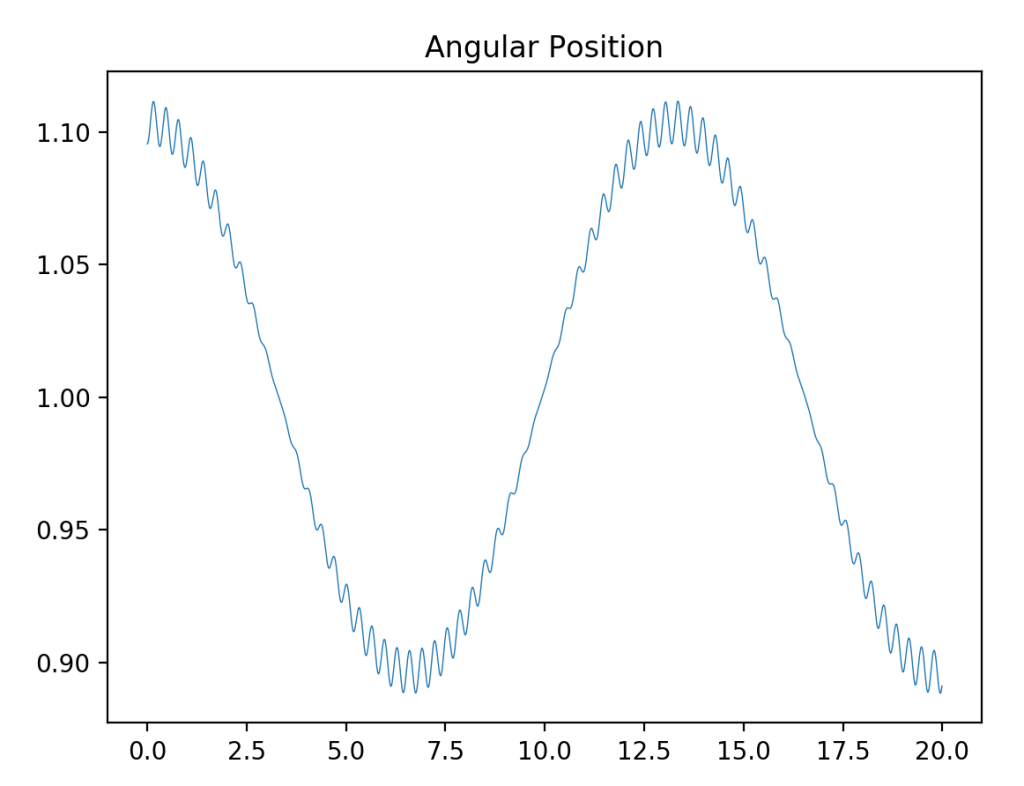
You can play with the parameters of this program to explore the physics of dynamic equilibrium. For instance, if the control parameter is slightly above the threshold (F = 32) at which a dip appears in the effective potential, the slow oscillation has a vary low frequency, as shown in Fig. 2. The high-frequency drive can still be seen superposed on the slow oscillation of the pendulum that is oscillating just like an ordinary pendulum but up-side-down!
The oscillation frequency is a function of the drive amplitude. This is a classic signature of a nonlinear system: amplitude-frequency coupling. Well above the threshold (F = 100), the frequency of oscillation in the effective potential becomes much larger, as in Fig. 3.
When the drive amplitude is more than four times larger than the threshold value (F > 140), the equilibrium is destroyed, so there is an upper bound to the dynamic stabilization. This happens when the “slow” frequency becomes comparable to the drive frequency and the separation-of-time-scales approach is no longer valid.
You can also play with the damping (delt) to see what effect it has on thresholds and long-term behavior starting at delt = 0.001 and increasing it.
Other Examples of Dynamic Equilibrium
Every physics student learns that there is no stable electrostatic equilibrium. However, if charges are put into motion, then a time-averaged potential can be created that can confine a charged particle. This is the principle of the Paul Ion Trap, named after Wolfgang Paul who was awarded the Nobel Prize in Physics in 1989 for this invention.
One of the most famous examples of dynamic equilibrium are the L4 and L5 Lagrange points. In the Earth-Jupiter system, these are the locations of the Trojan asteroids. These special Lagrange points are maxima (unstable equilibria) in the effective potential of a rotation coordinate system, but the Coriolis force creates a local minimum that traps the asteroids in a dynamically stable equilibrium.
In economics, general equilibrium theory describes how oscillating prices among multiple markets can stabilize economic performance in macroeconomics.
A recent paper in Science magazine used the principle of dynamic equilibrium to levitate a layer of liquid on which toy boats can ride right-side-up and up-side-down. For an interesting video see Upside-down boat (link).
References
[1] Stephenson Andrew (1908). “XX.On induced stability”. Philosophical Magazine. 6. 15: 233–236.
[2] Kapitza P. L. (1951). “Dynamic stability of a pendulum when its point of suspension vibrates”. Soviet Phys. JETP. 21: 588–597.
Links
https://en.wikipedia.org/wiki/Kapitza%27s_pendulum
A detailed derivation of Kapitsa’s approach:https://elmer.unibas.ch/pendulum/upside.htm
The bifurcation threshold for the inverted pendulum is a pitchfork bifurcation https://elmer.unibas.ch/pendulum/bif.htm#pfbif
This Blog Post is a Companion to the undergraduate physics textbook Modern Dynamics: Chaos, Networks, Space and Time, 2nd ed. (Oxford, 2019) introducing Lagrangians and Hamiltonians, chaos theory, complex systems, synchronization, neural networks, econophysics and Special and General Relativity.


[…] Up-side-down Physics: Dynamic Equilibrium and the Inverted Pendulum […]
LikeLike