Find an iPhone, then flip it face upwards (hopefully over a soft cushion or mattress). What do you see?
An iPhone is a rectangular parallelepiped with three unequal dimensions and hence three unequal principle moments of inertia I1 < I2 < I3. These axes are: vertical to the face, horizontal through the small dimension, and horizontal through the long dimension. So now spin the iPhone around its long axis, it keeps a nice and steady spin. And then spin it around an axis point out of the face, again it’s a nice steady spin. But flip it face upwards, and it almost always does a half twist. Why?
The answer is variously known as the Tennis Racket Theorem or the Intermediate Axis Theorem or even the Dzhanibekov Effect. If you don’t have an iPhone or Samsung handy, then watch this NASA video of the effect.
Stability Analysis
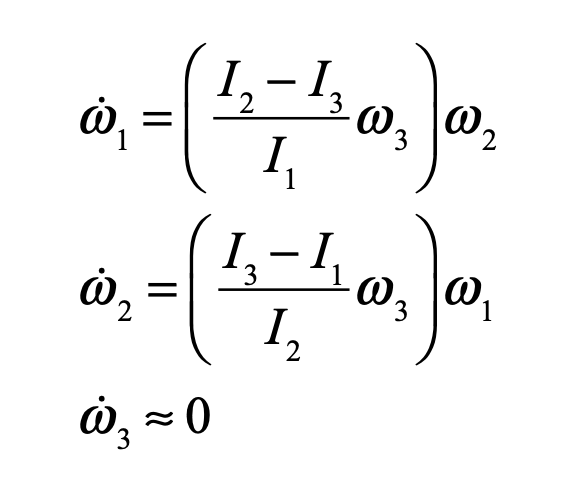
The flipping iPhone is a rigid body experiencing force-free motion. The Euler equations are an easy way to approach the somewhat complicated physics. These equations are
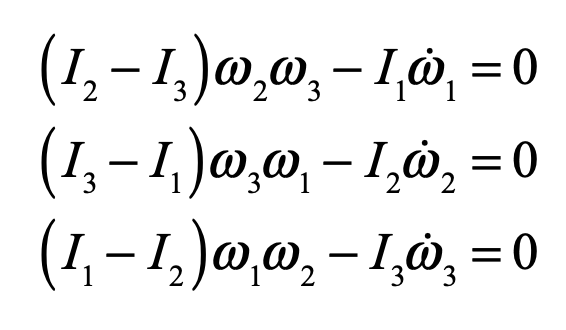
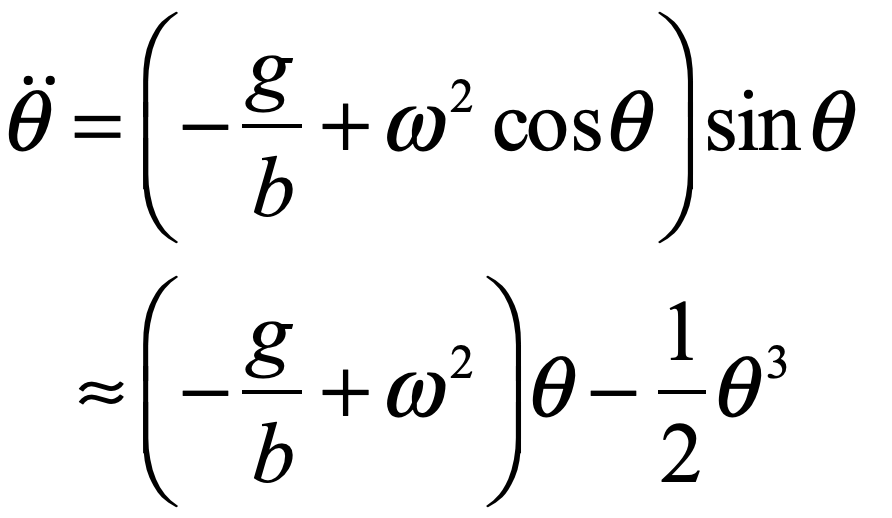
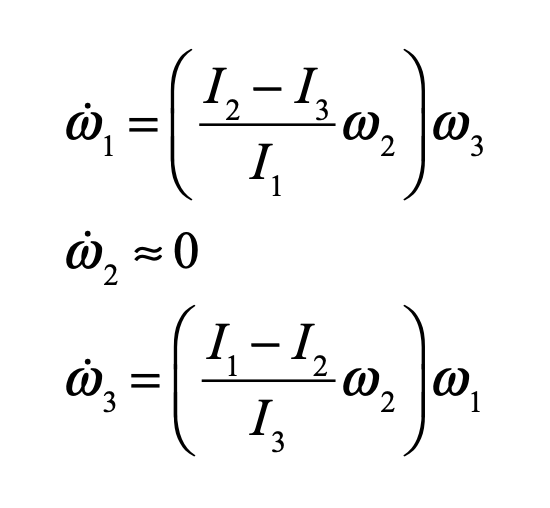
They all equal zero because there is no torque. First let’s assume the object is rotating mainly around the x1 axis so that ω2 and ω3 are small (rotating mainly around ω1). Then solving for the angular accelerations yields
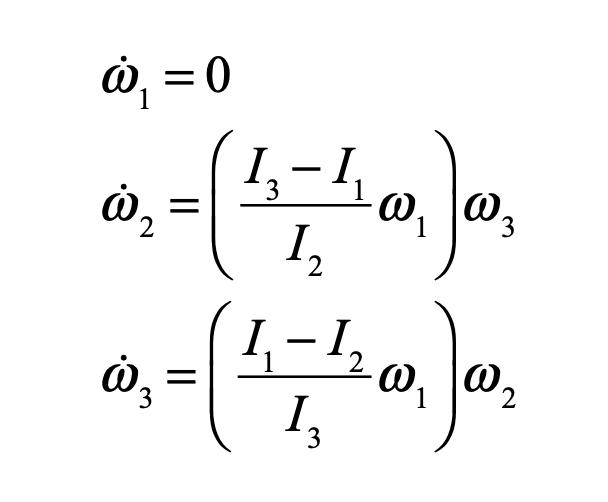
This is a two-dimensional flow equation in the variables ω2, ω3. Hence we can apply classic stability analysis for rotation mainly about the x1 axis. The Jacobian matrix is
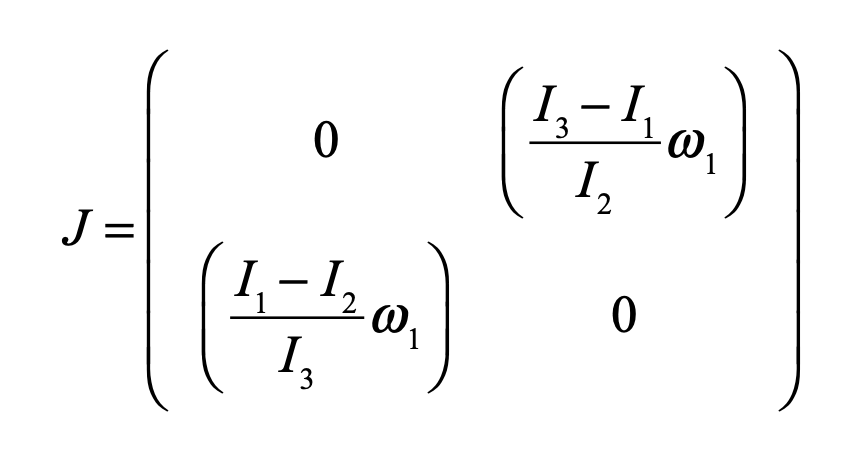
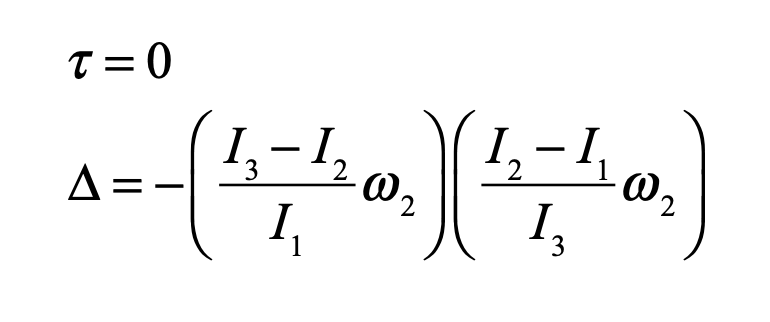
This matrix has a trace τ = 0 and a determinant Δ given by
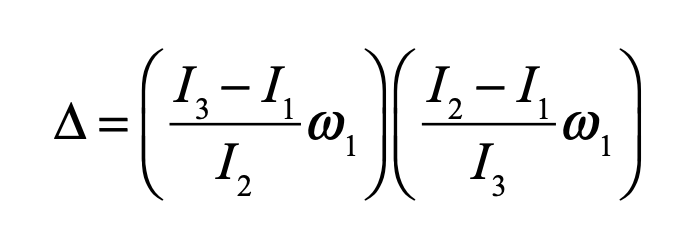
Because of the ordering I1 < I2 < I3 we know that this is quantity is positive.
Armed with the trace and the determinant of a two-dimensional flow, we simply need to look at the 2D “stability space” as shown in Fig. 1. The horizontal axis is the determinant of the Jacobian matrix evaluated at the fixed point of the motion, and the vertical axis is the trace. In the case of the flipping iPhone, the Jacobian matrix is independent of both ω2 and ω3 (if they are remain small), so it has a global stability. When the determinant is positive, the stability depends on the trace. If the trace is positive, all motions are unstable (deviations grow exponentially). If the trace is negative, all motions are stable. The sideways parabola in the figure is known as the discriminant. If solutions are within the discriminant, they are spirals. As the trace approaches the origin, the spirals get slower and slow, until they become simple harmonic motions when the trace goes to zero. This kind of marginal stability is also known as centers. Centers have a stead-state stability without dissipation.
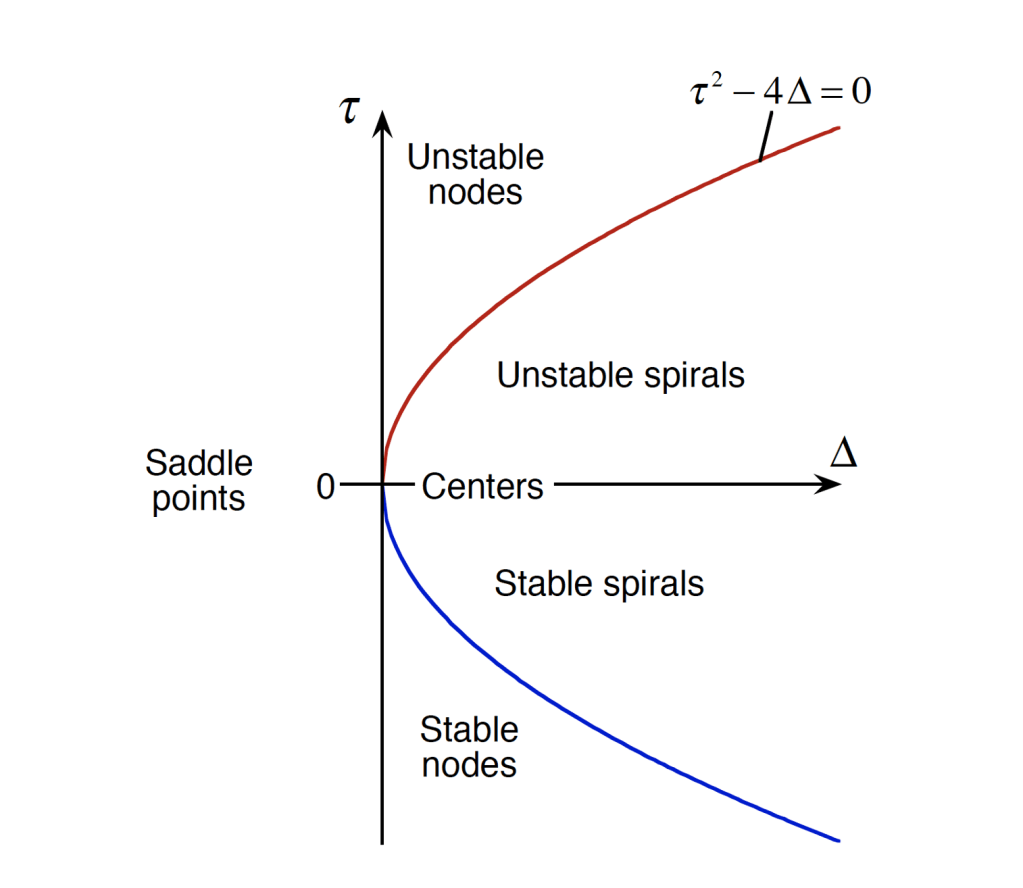
For the flipping iPhone (or tennis racket or book), the trace is zero and the determinant is positive for rotation mainly about the x1 axis, and the stability is therefore a “center”. This is why the iPhone spins nicely about its axis with the smallest moment.
Let’s permute the indices to get the motion about the x3 axis with the largest moment. Then
The trace and determinant are
where the determinant is again positive and the stability is again a center.
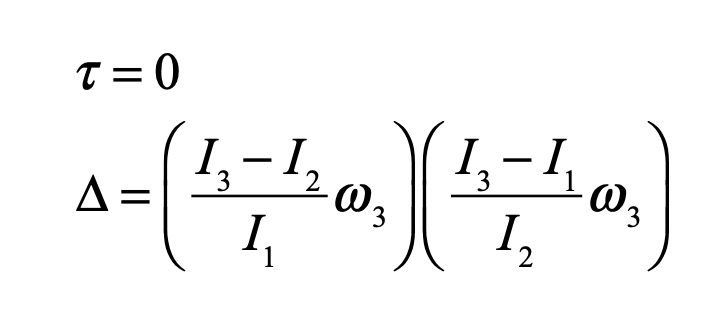
But now let’s permute again so that the motion is mainly about the x2 axis with the intermediate moment. In this case
And the trace and determinant are
The determinant is now negative, and from Fig. 1, this means that the stability is a saddle point.
Saddle points in 2D have one stable manifold and one unstable manifold. If the initial condition is just a little off the stability point, then the deviation will grow as the dynamical trajectory moves away from the equilibrium point along the unstable manifold.
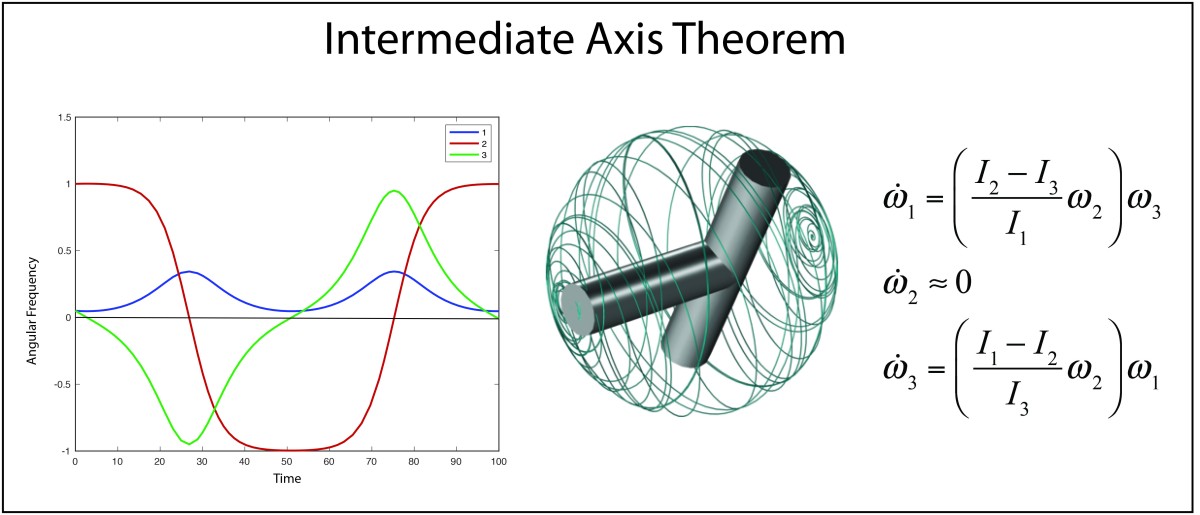
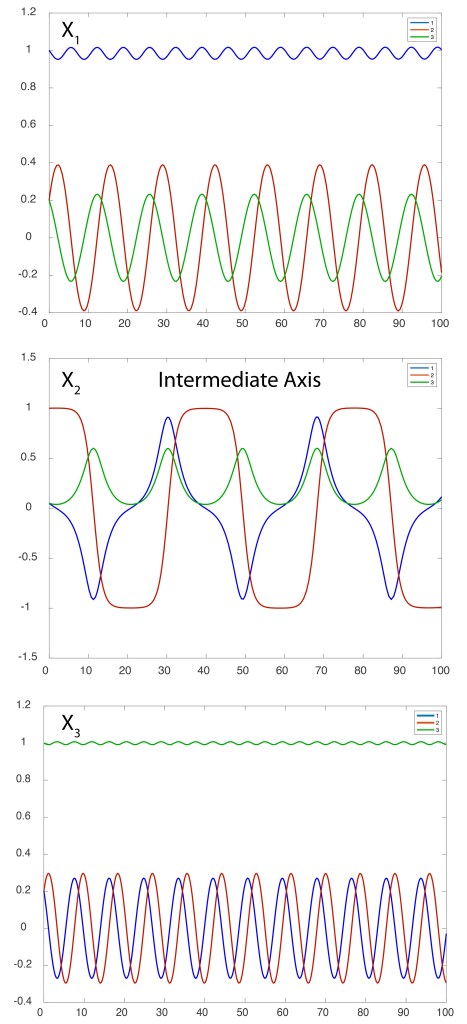
The components of the angular frequencies of each of these cases is shown in Fig. 2 for rotation mainly around x1, then x2 and then x3. A small amount of rotation is given as an initial condition about the other two axes for each case. For these calculations, no approximations were made, using the full Euler equations, and the motion is fully three-dimensional.
Fate of the Spinning Earth
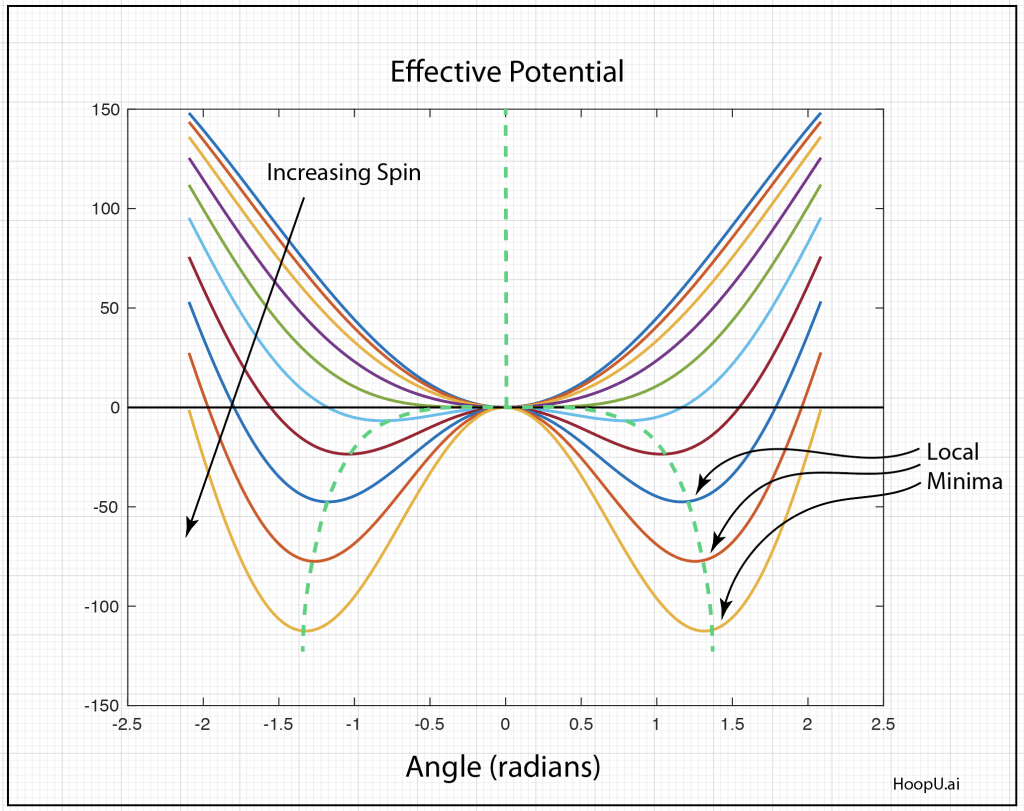
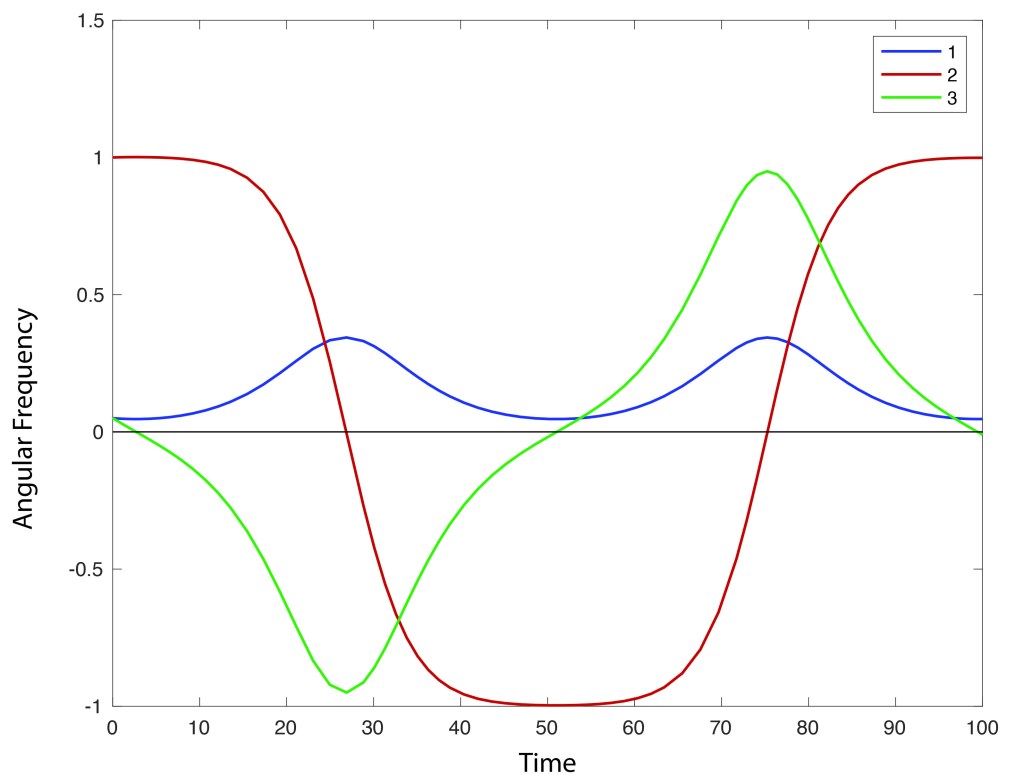
When two of the axes have very similar moments of inertia, that is, when the object becomes more symmetric, then the unstable dynamics can get very slow. An example is shown in Fig. 3 for I2 just a bit smaller than I3. The high frequency spin remains the same for long times and then quickly reverses. During the time when the spin is nearly stable, the other angular frequencies are close to zero, and the object would have only a slight wobble to it. Yet, in time, the wobble goes from bad to worse, until the whole thing flips over. It’s inevitable for almost any real-world solid…like maybe the Earth.
The Earth is an oblate spheroid, wider at the equator because of the centrifugal force of the rotation. If it were a perfect spheroid, then the two moments orthogonal to the spin axis would be identically equal. However, the Earth has landmasses, continents, that make the moments of inertia slightly unequal. This would have catastrophic consequences, because if the Earth were perfectly rigid, then every few million years it should flip over, scrambling the seasons!
But that doesn’t happen. The reason is that the Earth has a liquid mantel and outer core that very slowly dissipate any wobble. The Earth, and virtually every celestial object that has any type of internal friction, always spins about its axis with the highest moment of inertia, which also means the system relaxes to its lowest kinetic energy for conserved L through the simple equation
So we are safe!
Python Code (FlipPhone.py)
Here is a simple Python code to explore the intermediate axis theorem. (Python code on GitHub.) Change the moments of inertia and change the initial conditions. Note that this program does not solve for the actual motions–the configuration-space trajectories. The solution of the Euler equations gives the time evolution of the three components of the angular velocity. Incremental rotations could be applied through rotation matrices operating on the configuration space to yield the configuration-space trajectory of the flipping iPhone (link to the technical details here).
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
Created on Thurs Oct 7 19:38:57 2021
@author: David Nolte
Introduction to Modern Dynamics, 2nd edition (Oxford University Press, 2019)
FlipPhone Example
"""
import numpy as np
import matplotlib as mpl
from mpl_toolkits.mplot3d import Axes3D
from scipy import integrate
from matplotlib import pyplot as plt
plt.close('all')
fig = plt.figure()
ax = fig.add_axes([0, 0, 1, 1], projection='3d')
ax.axis('on')
I1 = 0.45 # Moments of inertia can be changed here
I2 = 0.5
I3 = 0.55
def solve_lorenz(max_time=300.0):
# Flip Phone
def flow_deriv(x_y_z, t0):
x, y, z = x_y_z
yp1 = ((I2-I3)/I1)*y*z;
yp2 = ((I3-I1)/I2)*z*x;
yp3 = ((I1-I2)/I3)*x*y;
return [yp1, yp2, yp3]
model_title = 'Flip Phone'
t = np.linspace(0, max_time/4, int(250*max_time/4))
# Solve for trajectories
x0 = [[0.01,1,0.01]] # Initial Conditions: Change the major rotation axis here ....
t = np.linspace(0, max_time, int(250*max_time))
x_t = np.asarray([integrate.odeint(flow_deriv, x0i, t)
for x0i in x0])
x, y, z = x_t[0,:,:].T
lines = ax.plot(x, y, z, '-')
plt.setp(lines, linewidth=0.5)
ax.view_init(30, 30)
plt.show()
plt.title(model_title)
plt.savefig('Flow3D')
return t, x_t
ax.set_xlim((-1.1, 1.1))
ax.set_ylim((-1.1, 1.1))
ax.set_zlim((-1.1, 1.1))
t, x_t = solve_lorenz()
plt.figure(2)
lines = plt.plot(t,x_t[0,:,0],t,x_t[0,:,1],t,x_t[0,:,2])
plt.setp(lines, linewidth=1)
[1] D. D. Nolte, Introduction to Modern Dynamics, 2nd Edition (Oxford, 2019)
To see more on the Intermediate Axis Theorem, watch this amazing Youtube.
And here is another description of the Intermediate Axis Theorem.
This Blog Post is a Companion to the textbook Introduction to Modern Dynamics: Chaos, Networks, Space and Time, 2nd ed. (Oxford, 2019) that introduces topics of classical dynamics, Lagrangians and Hamiltonians, chaos theory, complex systems, synchronization, neural networks, econophysics and Special and General Relativity.