
“What is a coconut worth to a cast-away on a deserted island?”
In the midst of the cast-away’s misfortune and hunger and exertion and food lies an answer that looks familiar to any physicist who speaks the words
“Assume a Lagrangian …”
It is the same process that determines how a bead slides along a bent wire in gravity or a skier navigates a ski hill. The answer: find the balance of economic forces subject to constraints.
Here is the history and the physics behind one of the simplest economic systems that can be conceived: Robinson Crusoe spending his time collecting coconuts!
Robinson Crusoe in Economic History
Daniel Defoe published “The Life and Strange Surprizing Adventures of Robinson Crusoe” in 1719, about a man who is shipwrecked on a deserted island and survives there for 28 years before being rescued. It was written in the first person, as if the author had actually lived through those experiences, and it was based on a real-life adventure story. It is one of the first examples of realistic fiction, and it helped establish the genre of the English novel.
Several writers on economic theory made mention of Robinson Crusoe as an example of a labor economy, but it was in 1871 that Robinson Crusoe became an economic archetype. In that year both William Stanley Jevons‘s The Theory of Political Economy and Carl Menger‘s Grundsätze der Volkswirtschaftslehre (Principles of Economics) used Robinson Crusoe to illustrate key principles of the budding marginalist revolution.
Marginalism in economic theory is the demarcation between classical economics and modern economics. The key principle of marginalism is the principle of “diminishing returns” as the value of something gets less as an individual has more of it. This principle makes functions convex, which helps to guarantee that there are equilibrium points in the economy. Economic equilibrium is a key concept and goal because it provides stability to economic systems.
One-Product Is a Dull Diet
The Robinson Crusoe economy is one of the simplest economic models that captures the trade-off between labor and production on one side, and leisure and consumption on the other. The model has a single laborer for whom there are 24*7 =168 hours in the week. Some of these hours must be spent finding food, let’s say coconuts, while the other hours are for leisure and rest. The production of coconuts follows a production curve
that is a function of labor L. There are diminishing returns in the finding of coconuts for a given labor, making the production curve of coconuts convex. The amount of rest is
and there is a reciprocal production curve q(R) related to less coconuts produced for more time spent resting. In this model it is assumed that all coconuts that are produced are consumed. This is known as market clearing when no surplus is built up.
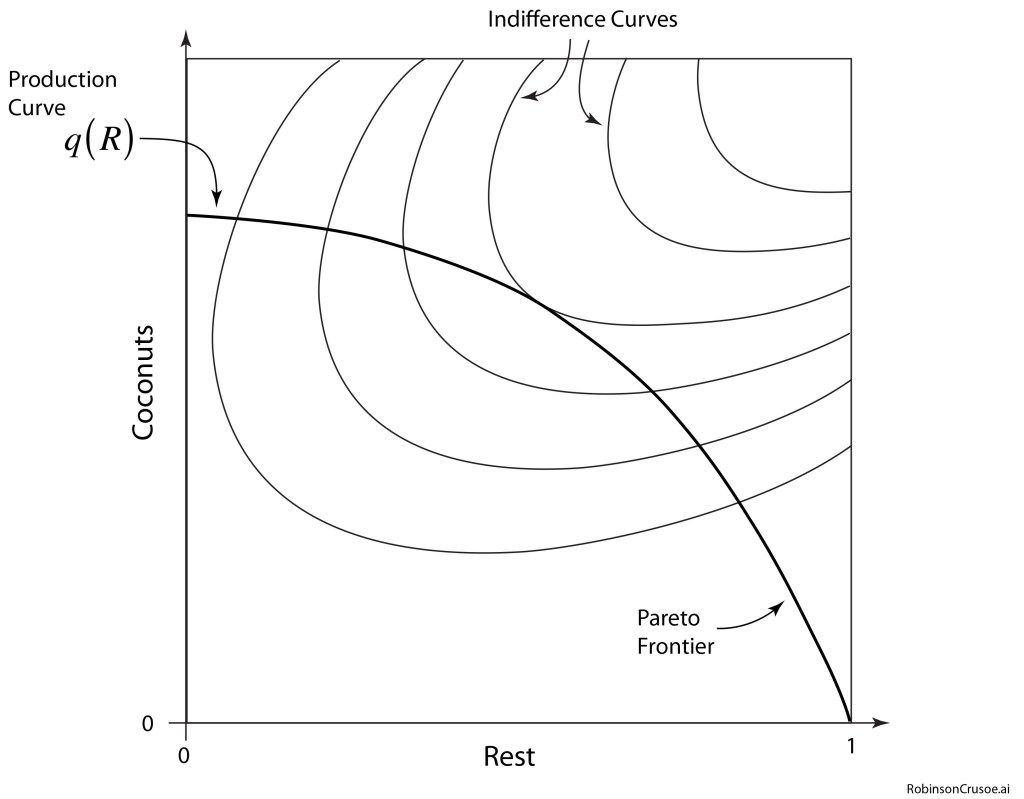
The production curve presents a continuous trade-off between consumption and leisure, but at first look there is no obvious way to decide how much to work and how much to rest. A lazy person might be willing to go a little hungry if they can have more rest, while a busy person might want to use all waking hours to find coconuts. The production curve represents something known as a Pareto frontier. It is a continuous trade-off between two qualities. Another example of a Pareto frontier is car engine efficiency versus cost. Some consumers may care more about the up-front cost of the car than the cost of gas, while other consumers may value fuel efficiency and be willing to pay higher costs to get it.
Continuous trade offs always present a bit of a problem for planning. It is often not clear what the best trade off should be. This problem is solved by introducing another concept into this little economy–the concept of “Utility”.
The utility function was introduced by the physicist Daniel Bernoulli, one of the many bountiful Bernoullis of Basel, in 1738. The utility function is a measure of how much benefit or utility a person or an enterprise gains by holding varying amounts of goods or labor. The essential problem in economic exchange is to maximize one’s utility function subject to whatever constraints are active. The utility function for Robinson Crusoe is
This function is obviously a maximum at maximum leisure (R = 1) and lots of coconuts (q = 1), but this is not allowed, because it lies off the production curve q(R). Therefore the question becomes: where on the production curve he can maximize the trade-off between coconuts and leisure?
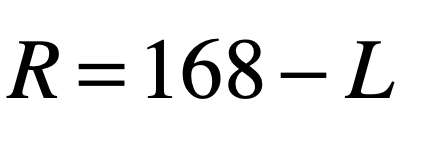
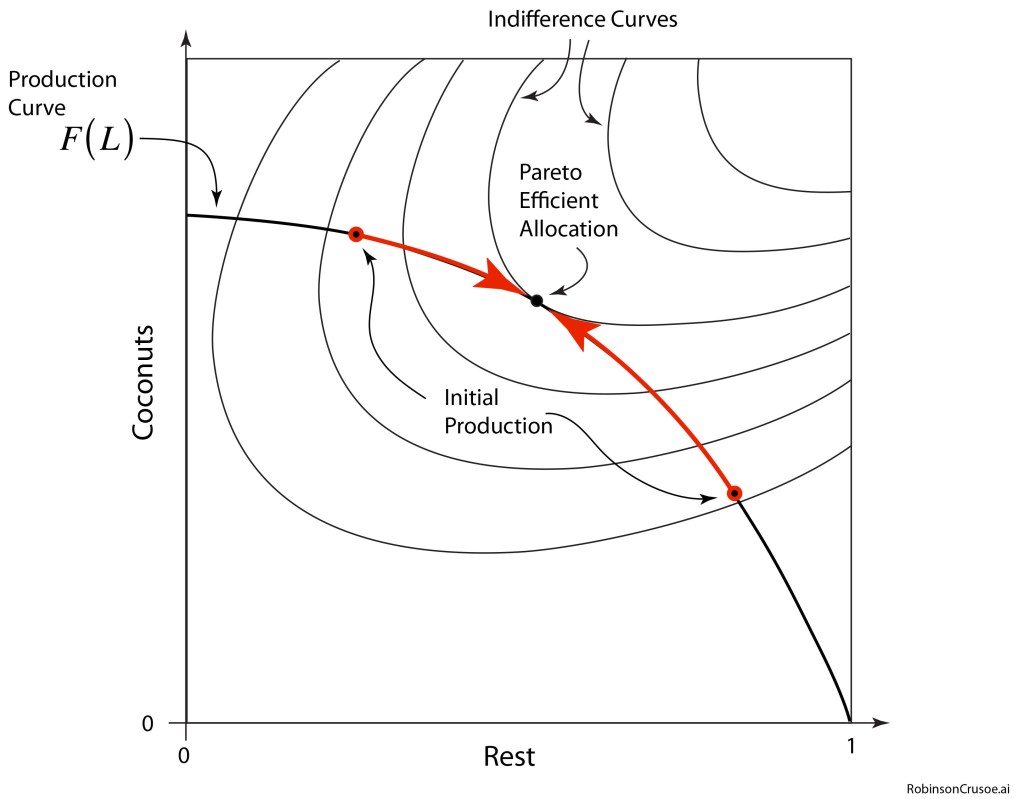
Fig. 1 shows the dynamical space for Robinson Crusoe’s economy. The space is two dimensional with axes for coconuts q and rest R. Isoclines of the utility function are shown as contours known as “indifference” curves, because the utility is constant along these curves and hence Robinson Crusoe is indifferent to his position on it. The indifference curves are cut by the production curve q(R). The equilibrium problem is to maximize utility subject to the production curve.
When looking at dynamics under constraints, Lagrange multipliers are the best tool. Furthermore, we can impart dynamics into the model with temporal adjustments in q and R that respond to economic forces.
The Lagrangian Economy
The approach to the Lagrangian economy is identical to the Lagrangian approach in classical physics. The equation of constraint is

All the dynamics take place on the production curve. The initial condition starts on the curve, and the state point moves along the curve until it reaches a maximum and settles into equilibrium. The dynamics is therefore one-dimensional, the link between q and R being the production curve.
The Lagrangian in this simple economy is given by the utility function augmented by the equation of constraint, such that

where λ is the Lagrangian undetermined multiplier. The Euler-Lagrange equations for dynamics are
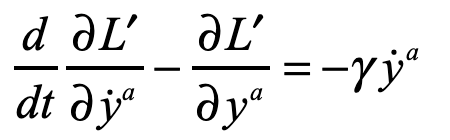
where the term on the right-hand-side is a drag force with the relaxation rate γ.
The first term on the left is the momentum of the system. In economic dynamics, this is usually negligible, similar to dynamics in living systems at low Reynold’s number in which all objects are moving instantaneously at their terminal velocity in response to forces. The equations of motion are therefore
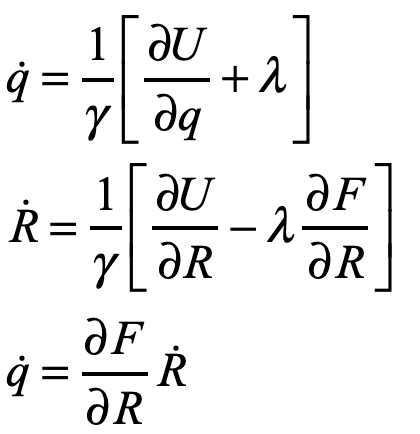
The Lagrange multiplier can be solved from the first equation as
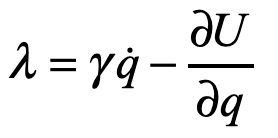
and the last equation converts q-dot to R-dot to yield the single equation
which is a one-dimensional flow
where all q’s are expressed as R’s through the equation of constraint. The speed vanishes at the fixed point—the economic equilibrium—when
This is the point of Pareto efficient allocation. Any initial condition on the production curve will relax to this point with a rate given by γ. These trajectories are shown in Fig. 2. From the point of view of Robinson Crusoe, if he is working harder than he needs, then he will slack off. But if there aren’t enough coconuts to make him happy, he will work harder.
The production curve is like a curved wire, the amount of production q is like the bead sliding on the wire. The utility function plays the role of a potential function, and the gradients of the utility function play the role of forces. Then this simple economic model is just like ordinary classical physics of point masses responding to forces constrained to lie on certain lines or surfaces. From this viewpoint, physics and economics are literally the same.
Worked Example
To make this problem specific, consider a utility function given by

that has a maximum in the upper right corner, and a production curve given by
that has diminishing returns. Then, the condition of equilibrium can be solved using
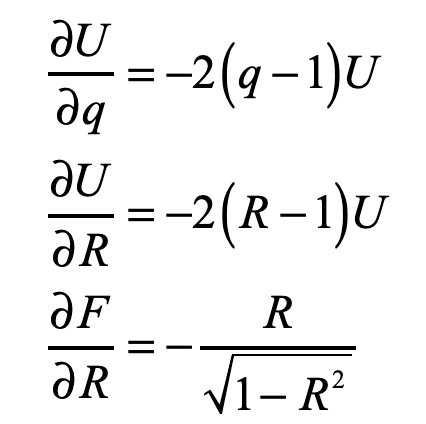
to yield
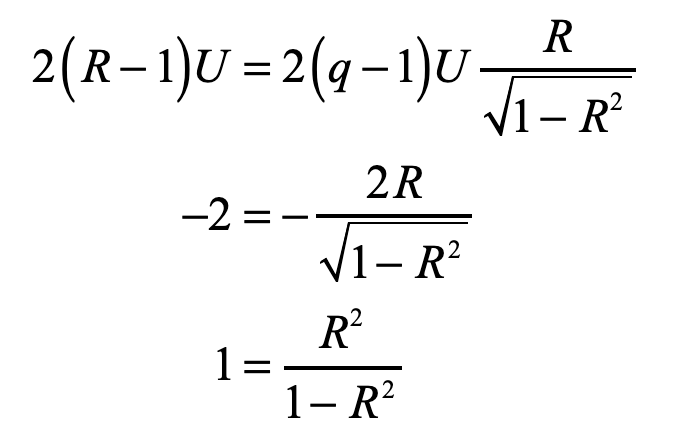
With the (fairly obvious) answer
By David D. Nolte, Feb. 10, 2022
For More Reading
[1] D. D. Nolte, Introduction to Modern Dynamics : Chaos, Networks, Space and Time, 2nd ed. Oxford : Oxford University Press (2019).
[2] Fritz Söllner; The Use (and Abuse) of Robinson Crusoe in Neoclassical Economics. History of Political Economy; 48 (1): 35–64. (2016)
This Blog Post is a Companion to the textbook Introduction to Modern Dynamics: Chaos, Networks, Space and Time, 2nd ed. (Oxford, 2019) that introduces topics of classical dynamics, Lagrangians and Hamiltonians, chaos theory, complex systems, synchronization, neural networks, econophysics and Special and General Relativity.



