… GR combined with nonlinear synchronization yields the novel phenomenon of a “synchronization cascade”.
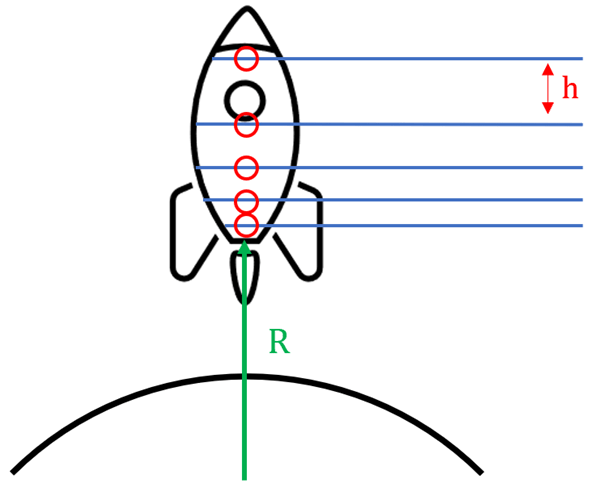
Imagine a space ship containing a collection of highly-accurate atomic clocks factory-set to arbitrary precision at the space-ship factory before launch. The clocks are lined up with precisely-equal spacing along the axis of the space ship, which should allow the astronauts to study events in spacetime to high accuracy as they orbit neutron stars or black holes. Despite all the precision, spacetime itself will conspire to detune the clocks. Yet all is not lost. Using the physics of nonlinear synchronization, the astronauts can bring all the clocks together to a compromise frequency—locking all the clocks to a common rate. This blog post shows how this can happen.
Fig.1 The high-precision space ship with a line of clocks.
Synchronization of Oscillators
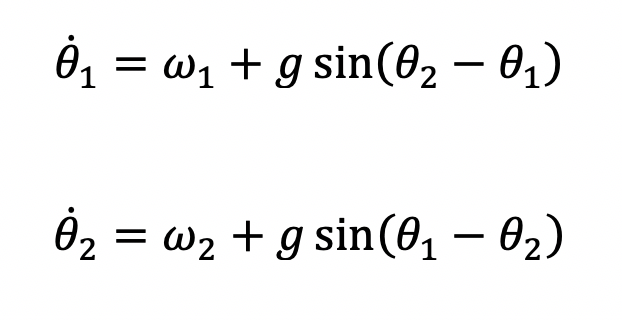
The simplest synchronization problem is two “phase oscillators” coupled with a symmetric nonlinearity. The dynamical flow is
where ωk are the individual angular frequencies and g is the coupling constant. When g is greater than the difference Δω, then the two oscillators, despite having different initial frequencies, will find a stable fixed point and lock to a compromise frequency.
Taking this model to N phase oscillators creates the well-known Kuramoto model that is characterized by a relatively sharp mean-field phase transition leading to global synchronization. The model averages N phase oscillators to a mean field where g is the coupling coefficient, K is the mean amplitude, Θ is the mean phase, and ω-bar is the mean frequency. The dynamics are given by
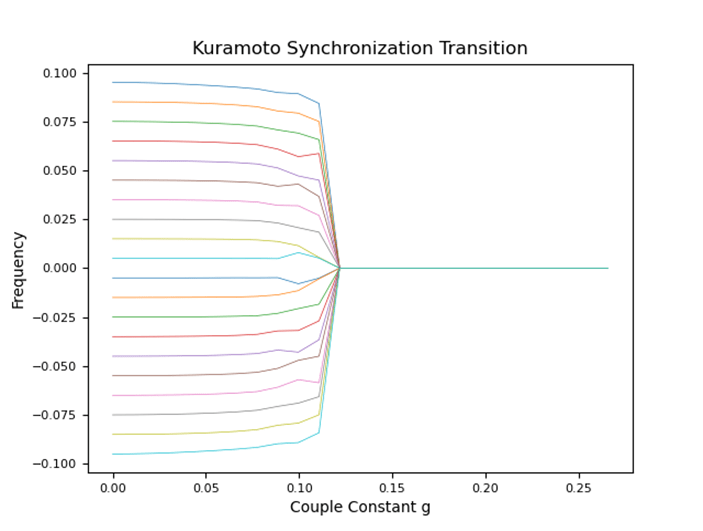
The last equation is the final mean-field equation that synchronizes each individual oscillator to the mean field. For a large number of oscillators that are globally coupled to each other, increasing the coupling has little effect on the oscillators until a critical threshold is crossed, after which all the oscillators synchronize with each other. This is known as the Kuramoto synchronization transition, shown in Fig. 2 for 20 oscillators with uniformly distributed initial frequencies. Note that the critical coupling constant gc is roughly half of the spread of initial frequencies.
Fig. 2 Entrainment graph of the Kuramoto transition for evenly distributed clock frequencies. N = 20.
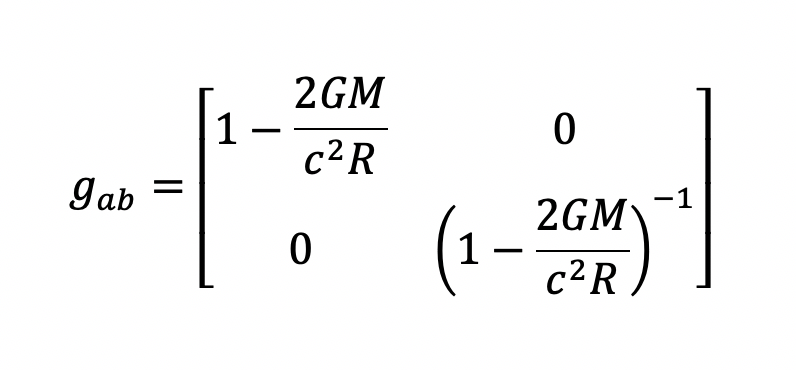
The question that this blog seeks to answer is how this synchronization mechanism may be used in a space craft exploring the strong gravity around neutron stars or black holes. The key to answering this question is the metric tensor for this system
where the first term is the time-like term g00 that affects ticking clocks, and the second term is the space-like term that affects the length of the space craft.
Kuramoto versus the Neutron Star
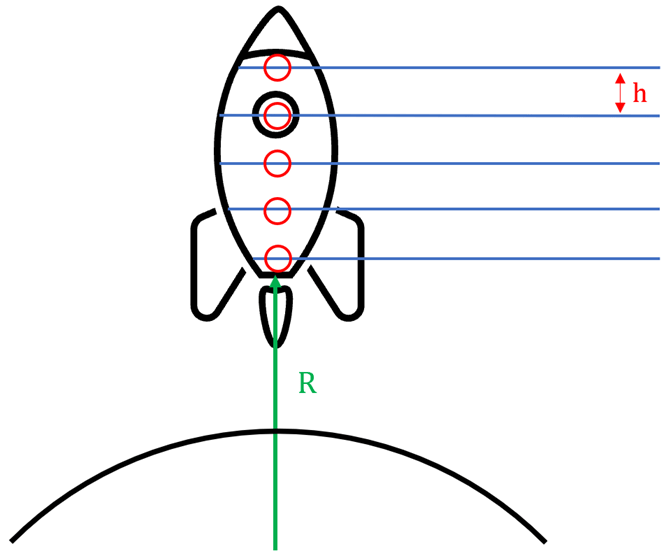
Consider the space craft holding a steady radius above a neutron star, as in Fig. 3. For simplicity, hold the craft stationary rather than in an orbit to remove the details of rotating frames. Because each clock is at a different gravitational potential, it runs at a different rate because of gravitational time dilation–clocks nearer to the neutron star run slower than clocks farther away. There is also a gravitational length contraction of the space craft, which modifies the clock rates as well.
Fig. 3 The space ship orbiting a neutron star. Each identical clock is at a different gravitational potential, causing them to run at different rates.
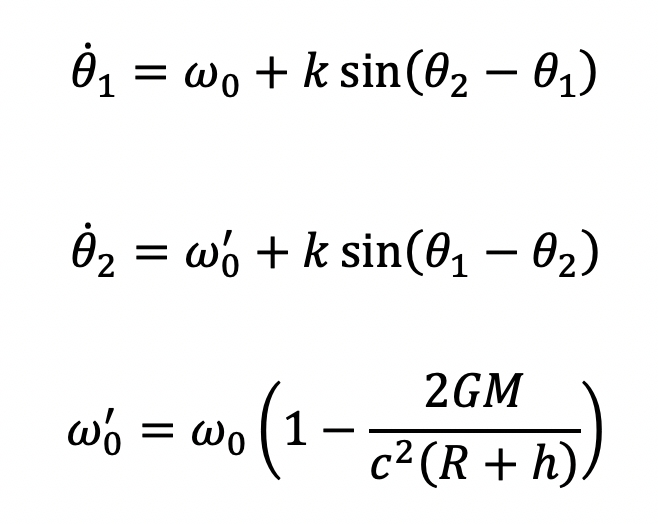
The analysis starts by incorporating the first-order approximation of time dilation through the component g00. The component is brought in through the period of oscillations. All frequencies are referenced to the base oscillator that has the angular rate ω0, and the other frequencies are primed. As we consider oscillators higher in the space craft at positions R + h, the 1/(R+h) term in g00 decreases as does the offset between each successive oscillator.
The dynamical equations for a system for only two clocks, coupled through the constant k, are
These are combined to a single equation by considering the phase difference
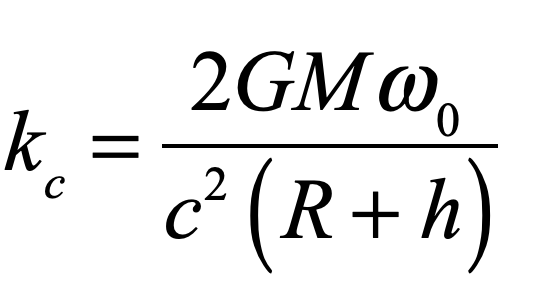
The two clocks will synchronize to a compromise frequency for the critical coupling coefficient
Now, if there is a string of N clocks, as in Fig. 3, the question is how the frequencies will spread out by gravitational time dilation, and what the entrainment of the frequencies to a common compromise frequency looks like. If the ship is located at some distance from the neutron star, then the gravitational potential at one clock to the next is approximately linear, and coupling them would produce the classic Kuramoto transition.
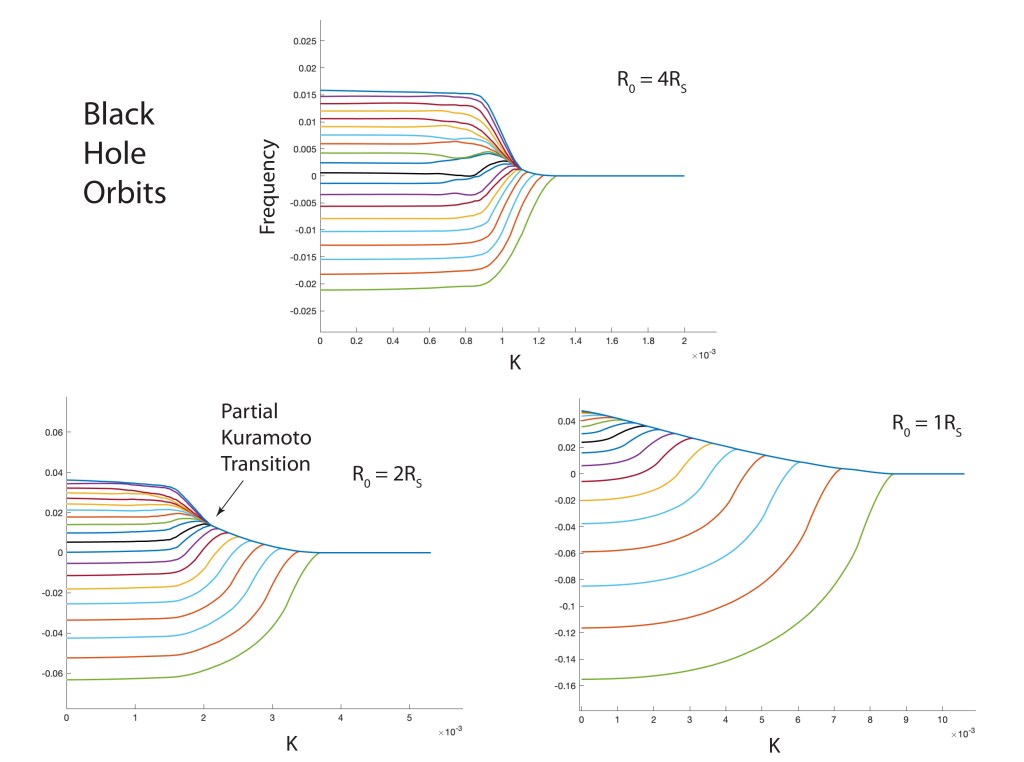
However, if the ship is much closer to the neutron star, so that the gravitational potential is no longer linear, then there is a “fan-out” of frequencies, with the bottom-most clock ticking much more slowly than the top-most clock. Coupling these clocks produces a modified, or “stretched”, Kuramoto transition as in Fig. 4.
Fig. 4 The “stretched” Kuramoto transition for N = 20 clocks near a neutron star. The bottom-most clock is just above the surface of the neutron star (left) and at twice that height (right). The spatial separation of the clocks in these examples is RS/20, and R0 is the radial position of the bottom-most clock.
In the two examples in Fig. 4, the bottom-most clock is just above the radius of the neutron star (at R0 = 4RS for a solar-mass neutron star, where RS is the Schwarzschild radius) and at twice that radius (at R0 = 8RS). The length of the ship, along which the clocks are distributed, is RS in this example. This may seem unrealistically large, but we could imagine a regular-sized ship supporting a long stiff cable dangling below it composed of carbon nanotubes that has the clocks distributed evenly on it, with the bottom-most clock at the radius R0. In fact, this might be a reasonable design for exploring spacetime events near a neutron star (although even carbon nanotubes would not be able to withstand the strain).
Kuramoto versus the Black Hole
Against expectation, exploring spacetime around a black hole is actually easier than around a neutron star, because there is no physical surface at the Schwarzschild radius RS, and gravitational tidal forces can be small for large black holes. In fact, one of the most unintuitive aspects of black holes pertains to a space ship falling into one. A distant observer sees the space ship contracting to zero length and the clocks slowing down and stopping as the space ship approaches the Schwarzschild radius asymptotically, but never crossing it. However, on board the ship, all appears normal as it crosses the Schwarzschild radius. To the astronaut inside, there is is a gravitational potential inside the space ship that causes the clocks at the base to run more slowly than the upper clocks, and length contraction affects the spacing a little, but otherwise there is no singularity as the event horizon is passed. This appears as a classic “paradox” of physics, with two different observers seeing paradoxically different behaviors.
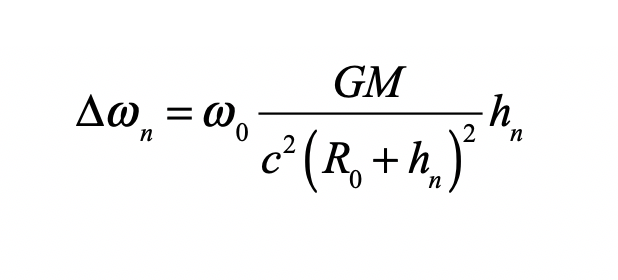
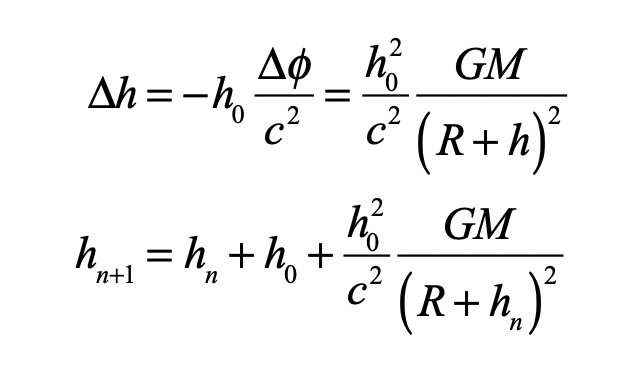
The resolution of this paradox lies in the differential geometry of the two observers. Each approximates spacetime with a Euclidean coordinate system that matches the local coordinates. The distant observer references the warped geometry to this “chart”, which produces the apparent divergence of the Schwarzschild metric at RS. However, the astronaut inside the space ship has her own flat chart to which she references the locally warped space time around the ship. Therefore, it is the differential changes, referenced to the ships coordinate origin, that capture gravitational time dilation and length contraction. Because the synchronization takes place in the local coordinate system of the ship, this is the coordinate system that goes into the dynamical equations for synchronization. Taking this approach, the shifts in the clock rates are given by the derivative of the metric as
where hn is the height of the n-th clock above R0.
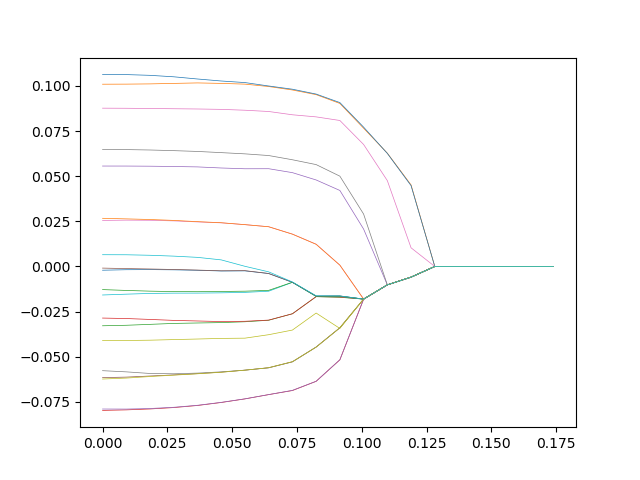
Fig. 5 shows the entrainment plot for the black hole. The plot noticeably has a much smoother transition. In this higher mass case, the system does not have as many hard coupling transitions and instead exhibits smooth behavior for global coupling. This is the Kuramoto “cascade”. Contrast the behavior of Fig. 5 (left) to the classic Kuramoto transition of Fig. 2. The increasing frequency separations near the black hole produces a succession of frequency locks as the coupling coefficient increases. For comparison, the case of linear coupling along the cable is shown in Fig. 5 on the right. The cascade is now accompanied with interesting oscillations as one clock entrains with a neighbor, only to be pulled back by interaction with locked subclusters.
Fig. 5 The Kuramoto cascade for R0 = 1RS for global coupling (left) and linear coupling (right).
Now let us consider what role the spatial component of the metric tensor plays in the synchronization. The spatial component causes the space between the oscillators to decrease closer to the supermassive object. This would cause the oscillators to entrain faster because the bottom oscillators that entrain the slowest would be closer together, but the top oscillators would entrain slower since they are a farther distance apart, as in Fig. 6.
Fig. 6 The space ship experiencing gravitational length contraction that changes the separations among the clocks and further changes their respective gravitational potentials and clock rates.
In terms of the local coordinates of the space ship, the locations of each clock are
These values for hn can be put into the equation for ωn above. But it is clear that this produces a second order effect. Even at the event horizon, this effect is only a fraction of the shifts caused by g00 directly on the clocks. This is in contrast to what a distant observer sees–the clock separations decreasing to zero, which would seem to decrease the frequency shifts. But the synchronization coupling is performed in the ship frame, not the distant frame, so the astronaut can safely ignore this contribution.
As a final exploration of the black hole, before we leave it behind, look at the behavior for different values of R0 in Fig. 7. At 4RS, the Kuramoto transition is stretched. At 2RS there is a partial Kuramoto transition for the upper clocks, that then stretch into a cascade of locking events for the lower clocks. At 1RS we see the full cascade as before.
Fig. 7 The Kuramoto transition stretches into a cascade as the radius approaches the event horizon.
Note from the Editor:
This blog post by Moira Andrews is based on her final project for Phys 411, upper division undergraduate mechanics, at Purdue University. Students are asked to combine two seemingly-unrelated aspects of modern dynamics and explore the results. Moira thought of synchronizing clocks that are experiencing gravitational time dilation near a massive body. This is a nice example of how GR combined with nonlinear synchronization yields the novel phenomenon of a “synchronization cascade”.
Bibliography
Cheng, T.-P. (2010). Relativity, Gravitation and Cosmology. Oxford University Press.
Keeton, C. (2014). Principles of Astrophysics. Springer.
Marmet, P. (n.d.). Natural Length Contraction Due to Gravity. Newton Physics – Links to Papers, Books and Web Sites. Retrieved April 27, 2021, from https://newtonphysics.on.ca/gravity/index.html
Nolte, D. D. (2019). Introduction to Modern Dynamics (2nd ed.). Oxford University Press, USA.
This Blog Post is a Companion to the undergraduate physics textbook Modern Dynamics: Chaos, Networks, Space and Time, 2nd ed. (Oxford, 2019) introducing Lagrangians and Hamiltonians, chaos theory, complex systems, synchronization, neural networks, econophysics and Special and General Relativity.
The second edition of Introduction to Modern Dynamics: Chaos, Networks, Space and Time is available from Oxford University Press and Amazon.
Most physics majors will use modern dynamics in their careers: nonlinearity, chaos, network theory, econophysics, game theory, neural nets, geodesic geometry, among many others.
The first edition of Introduction to Modern Dynamics (IMD) was an upper-division junior-level mechanics textbook at the level of Thornton and Marion (Classical Dynamics of Particles and Systems) and Taylor (Classical Mechanics). IMD helped lead an emerging trend in physics education to update the undergraduate physics curriculum. Conventional junior-level mechanics courses emphasized Lagrangian and Hamiltonian physics, but notably missing from the classic subjects are modern dynamics topics that most physics majors will use in their careers: nonlinearity, chaos, network theory, econophysics, game theory, neural nets, geodesic geometry, among many others. These are the topics at the forefront of physics that drive high-tech businesses and start-ups, which is where more than half of all physicists work. IMD introduced these modern topics to junior-level physics majors in an accessible form that allowed them to master the fundamentals to prepare them for the modern world.
The second edition (IMD2) continues that trend by expanding the chapters to include additional material and topics. It rearranges several of the introductory chapters for improved logical flow and expands them to include key conventional topics that were missing in the first edition (e.g., Lagrange undetermined multipliers and expanded examples of Lagrangian applications). It is also an opportunity to correct several typographical errors and other errata that students have identified over the past several years. The second edition also has expanded homework problems.
The goal of IMD2 is to strengthen the sections on conventional topics (that students need to master to take their GREs) to make IMD2 attractive as a mainstream physics textbook for broader adoption at the junior level, while continuing the program of updating the topics and approaches that are relevant for the roles that physicists play in the 21st century.
(New Chapters and Sections highlighted in red.)
New Features in Second Edition:
Second Edition Chapters and Sections
Part 1 Geometric Mechanics
• Expanded development of Lagrangian dynamics
• Lagrange multipliers
• More examples of applications
• Connection to statistical mechanics through the virial theorem
• Greater emphasis on action-angle variables
• The key role of adiabatic invariants
Part 1 Geometric Mechanics
Chapter
1 Physics and Geometry
1.1 State space and dynamical flows
1.2 Coordinate representations
1.3 Coordinate transformation
1.4 Uniformly rotating frames
1.5 Rigid-body motion
Chapter
2 Lagrangian Mechanics
2.1 Calculus of variations
2.2 Lagrangian applications
2.3 Lagrange’s undetermined multipliers
2.4 Conservation laws
2.5 Central force motion
2.6 Virial Theorem
Chapter
3 Hamiltonian Dynamics and Phase Space
3.1 The Hamiltonian function
3.2 Phase space
3.3 Integrable systems and action–angle
variables
3.4 Adiabatic invariants
Part 2 Nonlinear Dynamics
• New section on non-autonomous dynamics
• Entire new chapter devoted to Hamiltonian mechanics
• Added importance to Chirikov standard map
• The important KAM theory of “constrained chaos” and solar system stability
• Degeneracy in Hamiltonian chaos
• A short overview of quantum chaos
• Rational resonances and the relation to KAM theory
• A new section of game theory in the context of evolutionary dynamics
• A new section on general equilibrium theory in economics
Part 3 Complex Systems
Chapter
7
Network Dynamics
7.1 Network structures
7.2 Random network topologies
7.3 Synchronization on networks
7.4 Diffusion on networks
7.5 Epidemics on networks
Chapter
8
Evolutionary Dynamics
81 Population dynamics
8.2 Virus infection and immune
deficiency
8.3 Replicator Dynamics
8.4 Quasi-species
8.5 Game theory and evolutionary
stable solutions
Chapter
9
Neurodynamics and Neural Networks
9.1 Neuron structure and function
9.2 Neuron dynamics
9.3 Network nodes: artificial neurons
9.4 Neural network architectures
9.5 Hopfield neural network
9.6 Content-addressable (associative) memory
Chapter
10
Economic Dynamics
10.1 Microeconomics
and equilibrium
10.2 Macroeconomics
10.3
Business cycles
10.4 Random walks and stock prices
(optional)
Part 4 Relativity and Space–Time
• Relativistic trajectories
• Gravitational waves
Part 4 Relativity and Space–Time
Chapter
11
Metric Spaces and Geodesic Motion
11.1 Manifolds and metric tensors
11.2 Derivative of a tensor
11.3 Geodesic curves in configuration
space
11.4 Geodesic motion
Chapter
12
Relativistic Dynamics
12.1 The special theory
12.2 Lorentz transformations
12.3 Metric structure of Minkowski space
12.4 Relativistic trajectories
12.5 Relativistic dynamics
12.6 Linearly accelerating frames
(relativistic)
Chapter
13
The General Theory of Relativity and Gravitation
13.1 Riemann curvature tensor
13.2 The Newtonian correspondence
13.3 Einstein’s field equations
13.4 Schwarzschild space–time
13.5 Kinematic consequences of gravity
13.6 The deflection of light by gravity
13.7 The precession of Mercury’s
perihelion
13.8 Orbits near a black hole
13.9 Gravitational waves
Synopsis of
2nd Ed. Chapters
Chapter 1. Physics
and Geometry (Sample Chapter)
This chapter has been rearranged relative to the 1st edition to provide a more logical flow of the overarching concepts of geometric mechanics that guide the subsequent chapters. The central role of coordinate transformations is strengthened, as is the material on rigid-body motion with expanded examples.
Chapter 2.
Lagrangian Mechanics (Sample Chapter)
Much of the structure and material is retained from the 1st edition while adding two important sections. The section on applications of Lagrangian mechanics adds many direct examples of the use of Lagrange’s equations of motion. An additional new section covers the important topic of Lagrange’s undetermined multipliers
Chapter 3.
Hamiltonian Dynamics and Phase Space (Sample Chapter)
The importance of Hamiltonian systems and dynamics merits a stand-alone chapter. The topics from the 1st edition are expanded in this new chapter, including a new section on adiabatic invariants that plays an important role in the development of quantum theory. Some topics are de-emphasized from the 1st edition, such as general canonical transformations and the symplectic structure of phase space, although the specific transformation to action-angle coordinates is retained and amplified.
Chapter 4. Nonlinear
Dynamics and Chaos
The first part of this chapter is retained from the 1st edition with numerous minor corrections and updates of figures. The second part of the IMD 1st edition, treating Hamiltonian chaos, will be expanded into the new Chapter 5.
Chapter 5.
Hamiltonian Chaos
This new stand-alone chapter expands on the last half of Chapter 3 of the IMD 1st edition. The physical character of Hamiltonian chaos is substantially distinct from dissipative chaos that it deserves its own chapter. It is also a central topic of interest for complex systems that are either conservative or that have integral invariants, such as our N-body solar system that played such an important role in the history of chaos theory beginning with Poincaré. The new chapter highlights Poincaré’s homoclinic tangle, illustrated by the Chirikov Standard Map. The Standard Map is an excellent introduction to KAM theory, which is one of the crowning achievements of the theory of dynamical systems by Komogorov, Arnold and Moser, connecting to deeper aspects of synchronization and rational resonances that drive the structure of systems as diverse as the rotation of the Moon and the rings of Saturn. This is also a perfect lead-in to the next chapter on synchronization. An optional section at the end of this chapter briefly discusses quantum chaos to show how Hamiltonian chaos can be extended into the quantum regime.
Chapter 6.
Synchronization
This is an updated version of the IMD 1st ed. chapter. It has a reduced initial section on coupled linear oscillators, retaining the key ideas about linear eigenmodes but removing some irrelevant details in the 1st edition. A new section is added that defines and emphasizes the importance of quasi-periodicity. A new section on the synchronization of chaotic oscillators is added.
Chapter 7. Network
Dynamics
This chapter rearranges the structure of the chapter from the 1st edition, moving synchronization on networks earlier to connect from the previous chapter. The section on diffusion and epidemics is moved to the back of the chapter and expanded in the 2nd edition into two separate sections on these topics, adding new material on discrete matrix approaches to continuous dynamics.
Chapter 8.
Neurodynamics and Neural Networks
This chapter is retained from the 1st edition with numerous minor corrections and updates of figures.
Chapter 9.
Evolutionary Dynamics
Two new sections are added to this chapter. A section on game theory and evolutionary stable solutions introduces core concepts of evolutionary dynamics that merge well with the other topics of the chapter such as the pay-off matrix and replicator dynamics. A new section on nearly neutral networks introduces new types of behavior that occur in high-dimensional spaces which are counter intuitive but important for understanding evolutionary drift.
Chapter 10. Economic Dynamics
This chapter will be significantly updated relative to the 1st edition. Most of the sections will be rewritten with improved examples and figures. Three new sections will be added. The 1st edition section on consumer market competition will be split into two new sections describing the Cournot duopoly and Pareto optimality in one section, and Walras’ Law and general equilibrium theory in another section. The concept of the Pareto frontier in economics is becoming an important part of biophysical approaches to population dynamics. In addition, new trends in economics are drawing from general equilibrium theory, first introduced by Walras in the nineteenth century, but now merging with modern ideas of fixed points and stable and unstable manifolds. A third new section is added on econophysics, highlighting the distinctions that contrast economic dynamics (phase space dynamical approaches to economics) from the emerging field of econophysics (statistical mechanics approaches to economics).
Chapter 11. Metric
Spaces and Geodesic Motion
This chapter is retained from the 1st edition with several minor corrections and updates of figures.
Chapter 12.
Relativistic Dynamics
This chapter is retained from the 1st edition with minor corrections and updates of figures. More examples will be added, such as invariant mass reconstruction. The connection between relativistic acceleration and Einstein’s equivalence principle will be strengthened.
Chapter 13. The
General Theory of Relativity and Gravitation
This chapter is retained from the 1st edition with minor corrections and updates of figures. A new section will derive the properties of gravitational waves, given the spectacular success of LIGO and the new field of gravitational astronomy.
Homework Problems:
All chapters will have expanded and updated homework problems. Many of the homework problems from the 1st edition will remain, but the number of problems at the end of each chapter will be nearly doubled, while removing some of the less interesting or problematic problems.
It is surprising how much of modern dynamics boils down to an extremely simple formula
This innocuous-looking equation carries such riddles, such surprises, such unintuitive behavior that it can become the object of study for life. This equation is called a vector flow equation, and it can be used to capture the essential physics of economies, neurons, ecosystems, networks, and even orbits of photons around black holes. This equation is to modern dynamics what F = ma was to classical mechanics. It is the starting point for understanding complex systems.
The Magic of Phase Space
The apparent simplicity of the “flow equation” masks the complexity it contains. It is a vector equation because each “dimension” is a variable of a complex system. Many systems of interest may have only a few variables, but ecosystems and economies and social networks may have hundreds or thousands of variables. Expressed in component format, the flow equation is
where the superscript spans the number of variables. But even this masks all that can happen with such an equation. Each of the functions fa can be entirely different from each other, and can be any type of function, whether polynomial, rational, algebraic, transcendental or composite, although they must be single-valued. They are generally nonlinear, and the limitless ways that functions can be nonlinear is where the richness of the flow equation comes from.
The vector flow equation is an ordinary differential equation (ODE) that can be solved for specific trajectories as initial value problems. A single set of initial conditions defines a unique trajectory. For instance, the trajectory for a 4-dimensional example is described as the column vector
which is the single-parameter position vector to a point in phase space, also called state space. The point sweeps through successive configurations as a function of its single parameter—time. This trajectory is also called an orbit. In classical mechanics, the focus has tended to be on the behavior of specific orbits that arise from a specific set of initial conditions. This is the classic “rock thrown from a cliff” problem of introductory physics courses. However, in modern dynamics, the focus shifts away from individual trajectories to encompass the set of all possible trajectories.
Why is Modern Dynamics part of Physics?
If finding the solutions to the “x-dot equals f” vector flow equation is all there is to do, then this would just be a math problem—the solution of ODE’s. There are plenty of gems for mathematicians to look for, and there is an entire of field of study in mathematics called “dynamical systems“, but this would not be “physics”. Physics as a profession is separate and distinct from mathematics, although the two are sometimes confused. Physics uses mathematics as its language and as its toolbox, but physics is not mathematics. Physics is done best when it is done qualitatively—this means with scribbles done on napkins in restaurants or on the back of envelopes while waiting in line. Physics is about recognizing relationships and patterns. Physics is about identifying the limits to scaling properties where the physics changes when scales change. Physics is about the mapping of the simplest possible mathematics onto behavior in the physical world, and recognizing when the simplest possible mathematics is a universal that applies broadly to diverse systems that seem different, but that share the same underlying principles.
So, granted solving ODE’s is not physics, there is still a tremendous amount of good physics that can be done by solving ODE’s. ODE solvers become the modern physicist’s experimental workbench, providing data output from numerical experiments that can test the dependence on parameters in ways that real-world experiments might not be able to access. Physical intuition can be built based on such simulations as the engaged physicist begins to “understand” how the system behaves, able to explain what will happen as the values of parameters are changed.
In the follow sections, three examples of modern dynamics are introduced with a preliminary study, including Python code. These examples are: Galactic dynamics, synchronized networks and ecosystems. Despite their very different natures, their description using dynamical flows share features in common and illustrate the beauty and depth of behavior that can be explored with simple equations.
Galactic Dynamics
One example of the power and beauty of the vector flow equation and its set of all solutions in phase space is called the Henon-Heiles model of the motion of a star within a galaxy. Of course, this is a terribly complicated problem that involves tens of billions of stars, but if you average over the gravitational potential of all the other stars, and throw in a couple of conservation laws, the resulting potential can look surprisingly simple. The motion in the plane of this galactic potential takes two configuration coordinates (x, y) with two associated momenta (px, py) for a total of four dimensions. The flow equations in four-dimensional phase space are simply
Fig. 1 The 4-dimensional phase space flow equations of a star in a galaxy. The terms in light blue are a simple two-dimensional harmonic oscillator. The terms in magenta are the nonlinear contributions from the stars in the galaxy.
where the terms in the light blue box describe a two-dimensional simple harmonic oscillator (SHO), which is a linear oscillator, modified by the terms in the magenta box that represent the nonlinear galactic potential. The orbits of this Hamiltonian system are chaotic, and because there is no dissipation in the model, a single orbit will continue forever within certain ranges of phase space governed by energy conservation, but never quite repeating.
Fig. 2 Two-dimensional Poincaré section of sets of trajectories in four-dimensional phase space for the Henon-Heiles galactic dynamics model. The perturbation parameter is &eps; = 0.3411 and the energy E = 1.
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
Hamilton4D.py
Created on Wed Apr 18 06:03:32 2018
@author: nolte
Derived from:
D. D. Nolte, Introduction to Modern Dynamics: Chaos, Networks, Space and Time, 2nd ed. (Oxford,2019)
"""
import numpy as np
import matplotlib as mpl
from mpl_toolkits.mplot3d import Axes3D
from scipy import integrate
from matplotlib import pyplot as plt
from matplotlib import cm
import time
import os
plt.close('all')
# model_case 1 = Heiles
# model_case 2 = Crescent
print(' ')
print('Hamilton4D.py')
print('Case: 1 = Heiles')
print('Case: 2 = Crescent')
model_case = int(input('Enter the Model Case (1-2)'))
if model_case == 1:
E = 1 # Heiles: 1, 0.3411 Crescent: 0.05, 1
epsE = 0.3411 # 3411
def flow_deriv(x_y_z_w,tspan):
x, y, z, w = x_y_z_w
a = z
b = w
c = -x - epsE*(2*x*y)
d = -y - epsE*(x**2 - y**2)
return[a,b,c,d]
else:
E = .1 # Crescent: 0.1, 1
epsE = 1
def flow_deriv(x_y_z_w,tspan):
x, y, z, w = x_y_z_w
a = z
b = w
c = -(epsE*(y-2*x**2)*(-4*x) + x)
d = -(y-epsE*2*x**2)
return[a,b,c,d]
prms = np.sqrt(E)
pmax = np.sqrt(2*E)
# Potential Function
if model_case == 1:
V = np.zeros(shape=(100,100))
for xloop in range(100):
x = -2 + 4*xloop/100
for yloop in range(100):
y = -2 + 4*yloop/100
V[yloop,xloop] = 0.5*x**2 + 0.5*y**2 + epsE*(x**2*y - 0.33333*y**3)
else:
V = np.zeros(shape=(100,100))
for xloop in range(100):
x = -2 + 4*xloop/100
for yloop in range(100):
y = -2 + 4*yloop/100
V[yloop,xloop] = 0.5*x**2 + 0.5*y**2 + epsE*(2*x**4 - 2*x**2*y)
fig = plt.figure(1)
contr = plt.contourf(V,100, cmap=cm.coolwarm, vmin = 0, vmax = 10)
fig.colorbar(contr, shrink=0.5, aspect=5)
fig = plt.show()
repnum = 250
mulnum = 64/repnum
np.random.seed(1)
for reploop in range(repnum):
px1 = 2*(np.random.random((1))-0.499)*pmax
py1 = np.sign(np.random.random((1))-0.499)*np.real(np.sqrt(2*(E-px1**2/2)))
xp1 = 0
yp1 = 0
x_y_z_w0 = [xp1, yp1, px1, py1]
tspan = np.linspace(1,1000,10000)
x_t = integrate.odeint(flow_deriv, x_y_z_w0, tspan)
siztmp = np.shape(x_t)
siz = siztmp[0]
if reploop % 50 == 0:
plt.figure(2)
lines = plt.plot(x_t[:,0],x_t[:,1])
plt.setp(lines, linewidth=0.5)
plt.show()
time.sleep(0.1)
#os.system("pause")
y1 = x_t[:,0]
y2 = x_t[:,1]
y3 = x_t[:,2]
y4 = x_t[:,3]
py = np.zeros(shape=(2*repnum,))
yvar = np.zeros(shape=(2*repnum,))
cnt = -1
last = y1[1]
for loop in range(2,siz):
if (last < 0)and(y1[loop] > 0):
cnt = cnt+1
del1 = -y1[loop-1]/(y1[loop] - y1[loop-1])
py[cnt] = y4[loop-1] + del1*(y4[loop]-y4[loop-1])
yvar[cnt] = y2[loop-1] + del1*(y2[loop]-y2[loop-1])
last = y1[loop]
else:
last = y1[loop]
plt.figure(3)
lines = plt.plot(yvar,py,'o',ms=1)
plt.show()
if model_case == 1:
plt.savefig('Heiles')
else:
plt.savefig('Crescent')
Networks, Synchronization and Emergence
A central paradigm of nonlinear science is the emergence of patterns and organized behavior from seemingly random interactions among underlying constituents. Emergent phenomena are among the most awe inspiring topics in science. Crystals are emergent, forming slowly from solutions of reagents. Life is emergent, arising out of the chaotic soup of organic molecules on Earth (or on some distant planet). Intelligence is emergent, and so is consciousness, arising from the interactions among billions of neurons. Ecosystems are emergent, based on competition and symbiosis among species. Economies are emergent, based on the transfer of goods and money spanning scales from the local bodega to the global economy.
One of the common underlying properties of emergence is the existence of networks of interactions. Networks and network science are topics of great current interest driven by the rise of the World Wide Web and social networks. But networks are ubiquitous and have long been the topic of research into complex and nonlinear systems. Networks provide a scaffold for understanding many of the emergent systems. It allows one to think of isolated elements, like molecules or neurons, that interact with many others, like the neighbors in a crystal or distant synaptic connections.
From the point of view of modern dynamics, the state of a node can be a variable or a “dimension” and the interactions among links define the functions of the vector flow equation. Emergence is then something that “emerges” from the dynamical flow as many elements interact through complex networks to produce simple or emergent patterns.
Synchronization is a form of emergence that happens when lots of independent oscillators, each vibrating at their own personal frequency, are coupled together to push and pull on each other, entraining all the individual frequencies into one common global oscillation of the entire system. Synchronization plays an important role in the solar system, explaining why the Moon always shows one face to the Earth, why Saturn’s rings have gaps, and why asteroids are mainly kept away from colliding with the Earth. Synchronization plays an even more important function in biology where it coordinates the beating of the heart and the functioning of the brain.
One of the most dramatic examples of synchronization is the Kuramoto synchronization phase transition. This occurs when a large set of individual oscillators with differing natural frequencies interact with each other through a weak nonlinear coupling. For small coupling, all the individual nodes oscillate at their own frequency. But as the coupling increases, there is a sudden coalescence of all the frequencies into a single common frequency. This mechanical phase transition, called the Kuramoto transition, has many of the properties of a thermodynamic phase transition, including a solution that utilizes mean field theory.
Fig. 3 The Kuramoto model for the nonlinear coupling of N simple phase oscillators. The term in light blue is the simple phase oscillator. The term in magenta is the global nonlinear coupling that connects each oscillator to every other.
The simulation of 20 Poncaré phase oscillators with global coupling is shown in Fig. 4 as a function of increasing coupling coefficient g. The original individual frequencies are spread randomly. The oscillators with similar frequencies are the first to synchronize, forming small clumps that then synchronize with other clumps of oscillators, until all oscillators are entrained to a single compromise frequency. The Kuramoto phase transition is not sharp in this case because the value of N = 20 is too small. If the simulation is run for 200 oscillators, there is a sudden transition from unsynchronized to synchronized oscillation at a threshold value of g.
Fig. 4 The Kuramoto model for 20 Poincare oscillators showing the frequencies as a function of the coupling coefficient.
The Kuramoto phase transition is one of the most important fundamental examples of modern dynamics because it illustrates many facets of nonlinear dynamics in a very simple way. It highlights the importance of nonlinearity, the simplification of phase oscillators, the use of mean field theory, the underlying structure of the network, and the example of a mechanical analog to a thermodynamic phase transition. It also has analytical solutions because of its simplicity, while still capturing the intrinsic complexity of nonlinear systems.
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
Created on Sat May 11 08:56:41 2019
@author: nolte
D. D. Nolte, Introduction to Modern Dynamics: Chaos, Networks, Space and Time, 2nd ed. (Oxford,2019)
"""
# https://www.python-course.eu/networkx.php
# https://networkx.github.io/documentation/stable/tutorial.html
# https://networkx.github.io/documentation/stable/reference/functions.html
import numpy as np
from scipy import integrate
from matplotlib import pyplot as plt
import networkx as nx
from UserFunction import linfit
import time
tstart = time.time()
plt.close('all')
Nfac = 25 # 25
N = 50 # 50
width = 0.2
# model_case 1 = complete graph (Kuramoto transition)
# model_case 2 = Erdos-Renyi
model_case = int(input('Input Model Case (1-2)'))
if model_case == 1:
facoef = 0.2
nodecouple = nx.complete_graph(N)
elif model_case == 2:
facoef = 5
nodecouple = nx.erdos_renyi_graph(N,0.1)
# function: omegout, yout = coupleN(G)
def coupleN(G):
# function: yd = flow_deriv(x_y)
def flow_deriv(y,t0):
yp = np.zeros(shape=(N,))
for omloop in range(N):
temp = omega[omloop]
linksz = G.node[omloop]['numlink']
for cloop in range(linksz):
cindex = G.node[omloop]['link'][cloop]
g = G.node[omloop]['coupling'][cloop]
temp = temp + g*np.sin(y[cindex]-y[omloop])
yp[omloop] = temp
yd = np.zeros(shape=(N,))
for omloop in range(N):
yd[omloop] = yp[omloop]
return yd
# end of function flow_deriv(x_y)
mnomega = 1.0
for nodeloop in range(N):
omega[nodeloop] = G.node[nodeloop]['element']
x_y_z = omega
# Settle-down Solve for the trajectories
tsettle = 100
t = np.linspace(0, tsettle, tsettle)
x_t = integrate.odeint(flow_deriv, x_y_z, t)
x0 = x_t[tsettle-1,0:N]
t = np.linspace(1,1000,1000)
y = integrate.odeint(flow_deriv, x0, t)
siztmp = np.shape(y)
sy = siztmp[0]
# Fit the frequency
m = np.zeros(shape = (N,))
w = np.zeros(shape = (N,))
mtmp = np.zeros(shape=(4,))
btmp = np.zeros(shape=(4,))
for omloop in range(N):
if np.remainder(sy,4) == 0:
mtmp[0],btmp[0] = linfit(t[0:sy//2],y[0:sy//2,omloop]);
mtmp[1],btmp[1] = linfit(t[sy//2+1:sy],y[sy//2+1:sy,omloop]);
mtmp[2],btmp[2] = linfit(t[sy//4+1:3*sy//4],y[sy//4+1:3*sy//4,omloop]);
mtmp[3],btmp[3] = linfit(t,y[:,omloop]);
else:
sytmp = 4*np.floor(sy/4);
mtmp[0],btmp[0] = linfit(t[0:sytmp//2],y[0:sytmp//2,omloop]);
mtmp[1],btmp[1] = linfit(t[sytmp//2+1:sytmp],y[sytmp//2+1:sytmp,omloop]);
mtmp[2],btmp[2] = linfit(t[sytmp//4+1:3*sytmp/4],y[sytmp//4+1:3*sytmp//4,omloop]);
mtmp[3],btmp[3] = linfit(t[0:sytmp],y[0:sytmp,omloop]);
#m[omloop] = np.median(mtmp)
m[omloop] = np.mean(mtmp)
w[omloop] = mnomega + m[omloop]
omegout = m
yout = y
return omegout, yout
# end of function: omegout, yout = coupleN(G)
Nlink = N*(N-1)//2
omega = np.zeros(shape=(N,))
omegatemp = width*(np.random.rand(N)-1)
meanomega = np.mean(omegatemp)
omega = omegatemp - meanomega
sto = np.std(omega)
lnk = np.zeros(shape = (N,), dtype=int)
for loop in range(N):
nodecouple.node[loop]['element'] = omega[loop]
nodecouple.node[loop]['link'] = list(nx.neighbors(nodecouple,loop))
nodecouple.node[loop]['numlink'] = np.size(list(nx.neighbors(nodecouple,loop)))
lnk[loop] = np.size(list(nx.neighbors(nodecouple,loop)))
avgdegree = np.mean(lnk)
mnomega = 1
facval = np.zeros(shape = (Nfac,))
yy = np.zeros(shape=(Nfac,N))
xx = np.zeros(shape=(Nfac,))
for facloop in range(Nfac):
print(facloop)
fac = facoef*(16*facloop/(Nfac))*(1/(N-1))*sto/mnomega
for nodeloop in range(N):
nodecouple.node[nodeloop]['coupling'] = np.zeros(shape=(lnk[nodeloop],))
for linkloop in range (lnk[nodeloop]):
nodecouple.node[nodeloop]['coupling'][linkloop] = fac
facval[facloop] = fac*avgdegree
omegout, yout = coupleN(nodecouple) # Here is the subfunction call for the flow
for omloop in range(N):
yy[facloop,omloop] = omegout[omloop]
xx[facloop] = facval[facloop]
plt.figure(1)
lines = plt.plot(xx,yy)
plt.setp(lines, linewidth=0.5)
plt.show()
elapsed_time = time.time() - tstart
print('elapsed time = ',format(elapsed_time,'.2f'),'secs')
The Web of Life
Ecosystems are among the most complex systems on Earth. The complex interactions among hundreds or thousands of species may lead to steady homeostasis in some cases, to growth and collapse in other cases, and to oscillations or chaos in yet others. But the definition of species can be broad and abstract, referring to businesses and markets in economic ecosystems, or to cliches and acquaintances in social ecosystems, among many other examples. These systems are governed by the laws of evolutionary dynamics that include fitness and survival as well as adaptation.
The dimensionality of the dynamical spaces for these systems extends to hundreds or thousands of dimensions—far too complex to visualize when thinking in four dimensions is already challenging. Yet there are shared principles and common behaviors that emerge even here. Many of these can be illustrated in a simple three-dimensional system that is represented by a triangular simplex that can be easily visualized, and then generalized back to ultra-high dimensions once they are understood.
A simplex is a closed (N-1)-dimensional geometric figure that describes a zero-sum game (game theory is an integral part of evolutionary dynamics) among N competing species. For instance, a two-simplex is a triangle that captures the dynamics among three species. Each vertex of the triangle represents the situation when the entire ecosystem is composed of a single species. Anywhere inside the triangle represents the situation when all three species are present and interacting.
A classic model of interacting species is the replicator equation. It allows for a fitness-based proliferation and for trade-offs among the individual species. The replicator dynamics equations are shown in Fig. 5.
Fig. 5 Replicator dynamics has a surprisingly simple form, but with surprisingly complicated behavior. The key elements are the fitness and the payoff matrix. The fitness relates to how likely the species will survive. The payoff matrix describes how one species gains at the loss of another (although symbiotic relationships also occur).
The population dynamics on the 2D simplex are shown in Fig. 6 for several different pay-off matrices. The matrix values are shown in color and help interpret the trajectories. For instance the simplex on the upper-right shows a fixed point center. This reflects the antisymmetric character of the pay-off matrix around the diagonal. The stable spiral on the lower-left has a nearly asymmetric pay-off matrix, but with unequal off-diagonal magnitudes. The other two cases show central saddle points with stable fixed points on the boundary. A very large variety of behaviors are possible for this very simple system. The Python program is shown in Trirep.py.
Fig. 6 Payoff matrix and population simplex for four random cases: Upper left is an unstable saddle. Upper right is a center. Lower left is a stable spiral. Lower right is a marginal case.
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
trirep.py
Created on Thu May 9 16:23:30 2019
@author: nolte
Derived from:
D. D. Nolte, Introduction to Modern Dynamics: Chaos, Networks, Space and Time, 2nd ed. (Oxford,2019)
"""
import numpy as np
from scipy import integrate
from matplotlib import pyplot as plt
plt.close('all')
def tripartite(x,y,z):
sm = x + y + z
xp = x/sm
yp = y/sm
f = np.sqrt(3)/2
y0 = f*xp
x0 = -0.5*xp - yp + 1;
plt.figure(2)
lines = plt.plot(x0,y0)
plt.setp(lines, linewidth=0.5)
plt.plot([0, 1],[0, 0],'k',linewidth=1)
plt.plot([0, 0.5],[0, f],'k',linewidth=1)
plt.plot([1, 0.5],[0, f],'k',linewidth=1)
plt.show()
def solve_flow(y,tspan):
def flow_deriv(y, t0):
#"""Compute the time-derivative ."""
f = np.zeros(shape=(N,))
for iloop in range(N):
ftemp = 0
for jloop in range(N):
ftemp = ftemp + A[iloop,jloop]*y[jloop]
f[iloop] = ftemp
phitemp = phi0 # Can adjust this from 0 to 1 to stabilize (but Nth population is no longer independent)
for loop in range(N):
phitemp = phitemp + f[loop]*y[loop]
phi = phitemp
yd = np.zeros(shape=(N,))
for loop in range(N-1):
yd[loop] = y[loop]*(f[loop] - phi);
if np.abs(phi0) < 0.01: # average fitness maintained at zero
yd[N-1] = y[N-1]*(f[N-1]-phi);
else: # non-zero average fitness
ydtemp = 0
for loop in range(N-1):
ydtemp = ydtemp - yd[loop]
yd[N-1] = ydtemp
return yd
# Solve for the trajectories
t = np.linspace(0, tspan, 701)
x_t = integrate.odeint(flow_deriv,y,t)
return t, x_t
# model_case 1 = zero diagonal
# model_case 2 = zero trace
# model_case 3 = asymmetric (zero trace)
print(' ')
print('trirep.py')
print('Case: 1 = antisymm zero diagonal')
print('Case: 2 = antisymm zero trace')
print('Case: 3 = random')
model_case = int(input('Enter the Model Case (1-3)'))
N = 3
asymm = 3 # 1 = zero diag (replicator eqn) 2 = zero trace (autocatylitic model) 3 = random (but zero trace)
phi0 = 0.001 # average fitness (positive number) damps oscillations
T = 100;
if model_case == 1:
Atemp = np.zeros(shape=(N,N))
for yloop in range(N):
for xloop in range(yloop+1,N):
Atemp[yloop,xloop] = 2*(0.5 - np.random.random(1))
Atemp[xloop,yloop] = -Atemp[yloop,xloop]
if model_case == 2:
Atemp = np.zeros(shape=(N,N))
for yloop in range(N):
for xloop in range(yloop+1,N):
Atemp[yloop,xloop] = 2*(0.5 - np.random.random(1))
Atemp[xloop,yloop] = -Atemp[yloop,xloop]
Atemp[yloop,yloop] = 2*(0.5 - np.random.random(1))
tr = np.trace(Atemp)
A = Atemp
for yloop in range(N):
A[yloop,yloop] = Atemp[yloop,yloop] - tr/N
else:
Atemp = np.zeros(shape=(N,N))
for yloop in range(N):
for xloop in range(N):
Atemp[yloop,xloop] = 2*(0.5 - np.random.random(1))
tr = np.trace(Atemp)
A = Atemp
for yloop in range(N):
A[yloop,yloop] = Atemp[yloop,yloop] - tr/N
plt.figure(3)
im = plt.matshow(A,3,cmap=plt.cm.get_cmap('seismic')) # hsv, seismic, bwr
cbar = im.figure.colorbar(im)
M = 20
delt = 1/M
ep = 0.01;
tempx = np.zeros(shape = (3,))
for xloop in range(M):
tempx[0] = delt*(xloop)+ep;
for yloop in range(M-xloop):
tempx[1] = delt*yloop+ep
tempx[2] = 1 - tempx[0] - tempx[1]
x0 = tempx/np.sum(tempx); # initial populations
tspan = 70
t, x_t = solve_flow(x0,tspan)
y1 = x_t[:,0]
y2 = x_t[:,1]
y3 = x_t[:,2]
plt.figure(1)
lines = plt.plot(t,y1,t,y2,t,y3)
plt.setp(lines, linewidth=0.5)
plt.show()
plt.ylabel('X Position')
plt.xlabel('Time')
tripartite(y1,y2,y3)
Topics in Modern Dynamics
These three examples are just the tip of the iceberg. The topics in modern dynamics are almost numberless. Any system that changes in time is a potential object of study in modern dynamics. Here is a list of a few topics that spring to mind.
“Modern physics” in the undergraduate physics curriculum has been monopolized, on the one hand, by quantum mechanics, nuclear physics, particle physics and astrophysics. “Classical mechanics”, on the other hand, has been monopolized by Lagrangians and Hamiltonians. While these are all admittedly interesting, the topics of modern dynamics that monopolize the time and actions of most physics-degree holders, as they work in high-tech start-ups, established technology companies, or on Wall Street, are not to be found. These are the topics of nonlinear dynamics, chaos theory, complex networks, finance, evolutionary dynamics and neural networks, among others.
There is a growing awareness that the undergraduate physics curriculum needs to be reinvigorated to make a physics degree relevant to the modern workplace. To that end, I am listing my top 10 topics of modern dynamics that can form the foundation of a revamped upper-division (junior level) mechanics course. Virtually all of these topics were once reserved for graduate-student-level courses, but all can be introduced to undergraduates in simple and intuitive ways without the need for advanced math.
1) Phase Space
The key change in perspective for modern dynamics that differentiates it from classical dynamics is the emphasis on the set of all possible trajectories that fill a “space” rather than emphasizing single trajectories defined by given initial conditions. Rather than study the motion of one rock thrown from a cliff top, modern dynamics studies an infinity of rocks thrown from every possible point and with every possible velocity. The space that contains this infinity of trajectories is known as phase space (or more generally state space). The equation of motion in state space becomes the dynamical flow, replacing Newton’s second law as the central mathematical structure of physics. Modern dynamics studies the properties of phase space rather than the properties of single trajectories, and makes rigorous and unique conclusions about classes of possible motions. This emphasis on classes of behavior is more general and more universal and more powerful, while also providing a fundamental “visual language” with which to describe the complex physics of complex systems.
2) Metric Space
The Cartesian coordinate plane that we were all taught in high school tends to dominate our thinking, biasing us towards linear flat geometries. Yet most dynamics do not take place in such simple Cartesian spaces. A case in point, virtually every real-world dynamics problem has constraints that confine the motion to a surface. Furthermore, the number of degrees of freedom of a dynamical system usually exceed our common 3-space, expanding to hundreds or even to thousands of dimensions. The surfaces of constraint are hypersurfaces of high dimensions (known as manifolds) and are almost certainly not flat hyperplanes. This daunting prospect of high-dimensional warped spaces can be surprisingly simplified through the concept of Bernhard Riemann’s “metric space”. Understanding the geometry of a metric space can be as simple as applying Pythagoras’ Theorem to sets of coordinates. For instance, the metric tensor can be taught and used without requiring students to know anything of tensor calculus. At the same time, it provides a useful tool for understanding dynamical patterns in phase space as well as orbits around black holes.
3) Invariants
Introductory physics classes emphasize the conservation of energy, linear momentum and angular momentum as if they are special cases. Yet there is a grand structure that yields a universal set of conservation laws: integrable Hamiltonian systems. An integrable system is one for which there are as many invariants of motion as there are degrees of freedom. Amazingly, these conservation laws can all be captured by a single procedure known as (canonical) transformation to action-angle coordinates. When expressed in action-angle form, these Hamiltonians take on extremely simple expressions. They are also the starting point for the study of perturbations when small nonintegrable terms are added to the Hamiltonian. As the perturbations grow, this provides one doorway to the emergence of chaos.
4) Chaos theory
“Chaos theory” is the more popular title for what is generally called “nonlinear dynamics”. Nonlinear dynamics takes place in state space when the dynamical flow equations have terms that algebraically are products of variables. One important distinction between chaos theory and nonlinear dynamics is the occurrence of unpredictability that can emerge in the dynamics when the number of variables is equal to three or higher. The equations, and the resulting dynamics, are still deterministic, but the trajectories are incredibly sensitive to initial conditions (SIC). In addition, the dynamical trajectories can relax to a submanifold of the original state space known as a strange attractor that typically is a fractal structure.
5) Synchronization
One of the central paradigms of nonlinear dynamics is the autonomous oscillator. Unlike the harmonic oscillator that eventually decays due to friction, autonomous oscillators are steady-state oscillators that convert steady energy input into oscillatory behavior. A prime example is the pendulum clock that converts the steady weight of a hanging mass into a sustained oscillation. When two autonomous oscillators (that normally oscillator at slightly different frequencies) are coupled weakly together, they can synchronize to the same frequency. This effect was discovered by Christiaan Huygens when he observed two pendulum clocks hanging next to each other on a wall synchronize the swings of their pendula. Synchronization is a central paradigm in modern dynamics for several reasons. First, it demonstrates the emergence of order when a collective behavior emerges from a collection of individual systems (this phenomenon of emergence is one of the fundamental principles of complex system science). Second, synchronized systems include such critical systems as the beating heart and the thinking brain. Third, synchronization becomes a useful tool to explore coupled systems that have a large number of linked subsystems, as in networks of nodes.
6) Network Dynamics
Networks have become one of the driving forces of our modern interconnected society. The structure of networks, the dynamics of nodes in networks, and the dynamic growth of networks are all coming into focus as we live our lives in multiple interconnected webs. Dynamics on networks include problems like diffusion and the spread of infection and connect with topics of percolation theory and critical phenomenon. Nonlinear dynamics on networks provide key opportunities and examples to study complex interacting systems.
7) Neural Networks
Perhaps the most enigmatic network is the network of neurons in the brain. The emergence of intelligence and of sentience is one of the greatest scientific questions. At a much simpler level, the nonlinear dynamics of small numbers of neurons display the properties of autonomous oscillators and synchronization, while larger sets of neurons become interconnected into dynamic networks. The dynamics of neurons and of neural networks is a key topic in modern dynamics. Not only can the physics of the networks be studied, but neural networks become tools for studying other complex systems.
8) Evolutionary Dynamics
The emergence of life and the evolution of species stands as another of the greatest scientific questions of our day. Although this topic traditionally is studied by the biological sciences (and mathematical biology), physics has a surprising lot to say on the topic. The dynamics of evolution can be captured in the same types of nonlinear flows that live in state space. For instance, population dynamics can be described as a large ensemble of interacting individuals that are born, flourish and die dependent on their environment and on their complicated interactions with other members in their ecosystem. These types of problems have state spaces of extremely high dimension far beyond what we can visualize. Yet the emergence of structure and of patterns from the complex dynamics helps to reduce the complexity, as do conceptual metaphors like evolutionary fitness landscapes.
9) Economic Dynamics
A non-negligible fraction of both undergraduate and graduate physics degree holders end up on Wall Street or in related industries. This is partly because physicists are numerically fluent while also possessing sound intuition. Therefore, economic dynamics is a potentially valuable addition to the modern dynamics curriculum and easily expressed using the concepts of dynamical flows and state space. Both microeconomics (business competition, business cycles) and macroeconomics (investment and savings, liquidity and money, inflation, unemployment) can be described and analyzed using mathematical flows that are the central toolkit of modern dynamics.
10) Relativity
Special relativity is a common topic in the current upper-division physics curriculum, while general relativity is viewed as too difficult to expose undergraduates to. This is mostly an artificial division, because Einstein’s “happiest thought” occurred when he realized that an observer in free fall is in a force-free (inertial) frame. The equivalence principle, that states that a frame in uniform acceleration is indistinguishable from a stationary frame in a uniform gravitational field, opens a wide door that connects special relativity to general relativity. In an undergraduate course on modern dynamics, the metric tensor (described above) is introduced in simple terms, providing the foundation to develop Minkowski spacetime, and the next natural extension is to warped spacetime—all at the simple level of linear algebra combined with partial differentiation. General relativity ties in many of the principles of the modern dynamics curriculum (dynamical flows, state space, metric space, invariants, nonlinear dynamics), and the students can simulate orbits around black holes with ease. I have been teaching General Relativity to undergraduates for over ten years now, and it is a highlight of the course.
Introduction to Modern Dynamics
For further reading and more details, these top 10 topics of modern dynamics are defined and explored in the undergraduate physics textbook “Introduction to Modern Dynamics: Chaos, Networks, Space and Time” published by Oxford University Press (Second Edition: 2019). This textbook is designed for use in a two-semester junior-level mechanics course. It introduces the topics of modern dynamics, while still presenting traditional materials that the students need for their physics GREs.