We are exceedingly fortunate that the Earth lies in the Goldilocks zone. This zone is the range of orbital radii of a planet around its sun for which water can exist in a liquid state. Water is the universal solvent, and it may be a prerequisite for the evolution of life. If we were too close to the sun, water would evaporate as steam. And if we are too far, then it would be locked in perpetual ice. As it is, the Earth has had wild swings in its surface temperature. There was once a time, more than 650 million years ago, when the entire Earth’s surface froze over. Fortunately, the liquid oceans remained liquid, and life that already existed on Earth was able to persist long enough to get to the Cambrian explosion. Conversely, Venus may once have had liquid oceans and maybe even nascent life, but too much carbon dioxide turned the planet into an oven and boiled away its water (a fate that may await our own Earth if we aren’t careful). What has saved us so far is the stability of our orbit, our steady distance from the Sun that keeps our water liquid and life flourishing. Yet it did not have to be this way.
The regions of regular motion associated with irrational numbers act as if they were a barrier, restricting the range of chaotic orbits and protecting other nearby orbits from the chaos.
Our solar system is a many-body problem. It consists of three large gravitating bodies (Sun, Jupiter, Saturn) and several minor ones (such as Earth). Jupiter does influence our orbit, and if it were only a few times more massive than it actually is, then our orbit would become chaotic, varying in distance from the sun in unpredictable ways. And if Jupiter were only about 20 times bigger than is actually is, there is a possibility that it would perturb the Earth’s orbit so strongly that it could eject the Earth from the solar system entirely, sending us flying through interstellar space, where we would slowly cool until we became a permanent ice ball. What can protect us from this terrifying fate? What keeps our orbit stable despite the fact that we inhabit a many-body solar system? The answer is number theory!
The Most Irrational Number
What is the most irrational number you can think of?
Is it: pi = 3.1415926535897932384626433 ?
Or Euler’s constant: e = 2.7182818284590452353602874 ?
How about: sqrt(3) = 1.73205080756887729352744634 ?
These are all perfectly good irrational numbers. But how do you choose the “most irrational” number? The answer is fairly simple. The most irrational number is the one that is least well approximated by a ratio of integers. For instance, it is possible to get close to pi through the ratio 22/7 = 3.1428 which differs from pi by only 4 parts in ten thousand. Or Euler’s constant 87/32 = 2.7188 differs from e by only 2 parts in ten thousand. Yet 87 and 32 are much bigger than 22 and 7, so it may be said that e is more irrational than pi, because it takes ratios of larger integers to get a good approximation. So is there a “most irrational” number? The answer is yes. The Golden Ratio.
The Golden ratio can be defined in many ways, but its most common expression is given by
It is the hardest number to approximate with a ratio of small integers. For instance, to get a number that is as close as one part in ten thousand to the golden mean takes the ratio 89/55. This result may seem obscure, but there is a systematic way to find the ratios of integers that approximate an irrational number. This is known as a convergent from continued fractions.
Continued fractions were invented by John Wallis in 1695, introduced in his book Opera Mathematica. The continued fraction for pi is
An alternate form of displaying this continued fraction is with the expression

The irrational character of pi is captured by the seemingly random integers in this string. However, there can be regular structure in irrational numbers. For instance, a different continued fraction for pi is

that has a surprisingly simple repeating pattern.
The continued fraction for the golden mean has an especially simple repeating form
or

This continued fraction has the slowest convergence for its continued fraction of any other number. Hence, the Golden Ratio can be considered, using this criterion, to be the most irrational number.
If the Golden Ratio is the most irrational number, how does that save us from the chaos of the cosmos? The answer to this question is KAM!
Kolmogorov, Arnold and Moser: (KAM) Theory
KAM is an acronym made from the first initials of three towering mathematicians of the 20th century: Andrey Kolmogorov (1903 – 1987), his student Vladimir Arnold (1937 – 2010), and Jürgen Moser (1928 – 1999).
In 1954, Kolmogorov, considered to be the greatest living mathematician at that time, was invited to give the plenary lecture at a mathematics conference. To the surprise of the conference organizers, he chose to talk on what seemed like a very mundane topic: the question of the stability of the solar system. This had been the topic which Poincaré had attempted to solve in 1890 when he first stumbled on chaotic dynamics. The question had remained open, but the general consensus was that the many-body nature of the solar system made it intrinsically unstable, even for only three bodies.
Against all expectations, Kolmogorov proposed that despite the general chaotic behavior of the three–body problem, there could be “islands of stability” which were protected from chaos, allowing some orbits to remain regular even while other nearby orbits were highly chaotic. He even outlined an approach to a proof of his conjecture, though he had not carried it through to completion.
The proof of Kolmogorov’s conjecture was supplied over the next 10 years through the work of the German mathematician Jürgen Moser and by Kolmogorov’s former student Vladimir Arnold. The proof hinged on the successive ratios of integers that approximate irrational numbers. With this work KAM showed that indeed some orbits are actually protected from neighboring chaos by relying on the irrationality of the ratio of orbital periods.
Resonant Ratios
Let’s go back to the simple model of our solar system that consists of only three bodies: the Sun, Jupiter and Earth. The period of Jupiter’s orbit is 11.86 years, but instead, if it were exactly 12 years, then its period would be in a 12:1 ratio with the Earth’s period. This ratio of integers is called a “resonance”, although in this case it is fairly mismatched. But if this ratio were a ratio of small integers like 5:3, then it means that Jupiter would travel around the sun 5 times in 15 years while the Earth went around 3 times. And every 15 years, the two planets would align. This kind of resonance with ratios of small integers creates a strong gravitational perturbation that alters the orbit of the smaller planet. If the perturbation is strong enough, it could disrupt the Earth’s orbit, creating a chaotic path that might ultimately eject the Earth completely from the solar system.
What KAM discovered is that as the resonance ratio becomes a ratio of large integers, like 87:32, then the planets have a hard time aligning, and the perturbation remains small. A surprising part of this theory is that a nearby orbital ratio might be 5:2 = 1.5, which is only a little different than 87:32 = 1.7. Yet the 5:2 resonance can produce strong chaos, while the 87:32 resonance is almost immune. This way, it is possible to have both chaotic orbits and regular orbits coexisting in the same dynamical system. An irrational orbital ratio protects the regular orbits from chaos. The next question is, how irrational does the orbital ratio need to be to guarantee safety?
You probably already guessed the answer to this question–the answer must be the Golden Ratio. If this is indeed the most irrational number, then it cannot be approximated very well with ratios of small integers, and this is indeed the case. In a three-body system, the most stable orbital ratio would be a ratio of 1.618034. But the more general question of what is “irrational enough” for an orbit to be stable against a given perturbation is much harder to answer. This is the field of Diophantine Analysis, which addresses other questions as well, such as Fermat’s Last Theorem.
KAM Twist Map
The dynamics of three-body systems are hard to visualize directly, so there are tricks that help bring the problem into perspective. The first trick, invented by Henri Poincaré, is called the first return map (or the Poincaré section). This is a way of reducing the dimensionality of the problem by one dimension. But for three bodies, even if they are all in a plane, this still can be complicated. Another trick, called the restricted three-body problem, is to assume that there are two large masses and a third small mass. This way, the dynamics of the two-body system is unaffected by the small mass, so all we need to do is focus on the dynamics of the small body. This brings the dynamics down to two dimensions (the position and momentum of the third body), which is very convenient for visualization, but the dynamics still need solutions to differential equations. So the final trick is to replace the differential equations with simple difference equations that are solved iteratively.
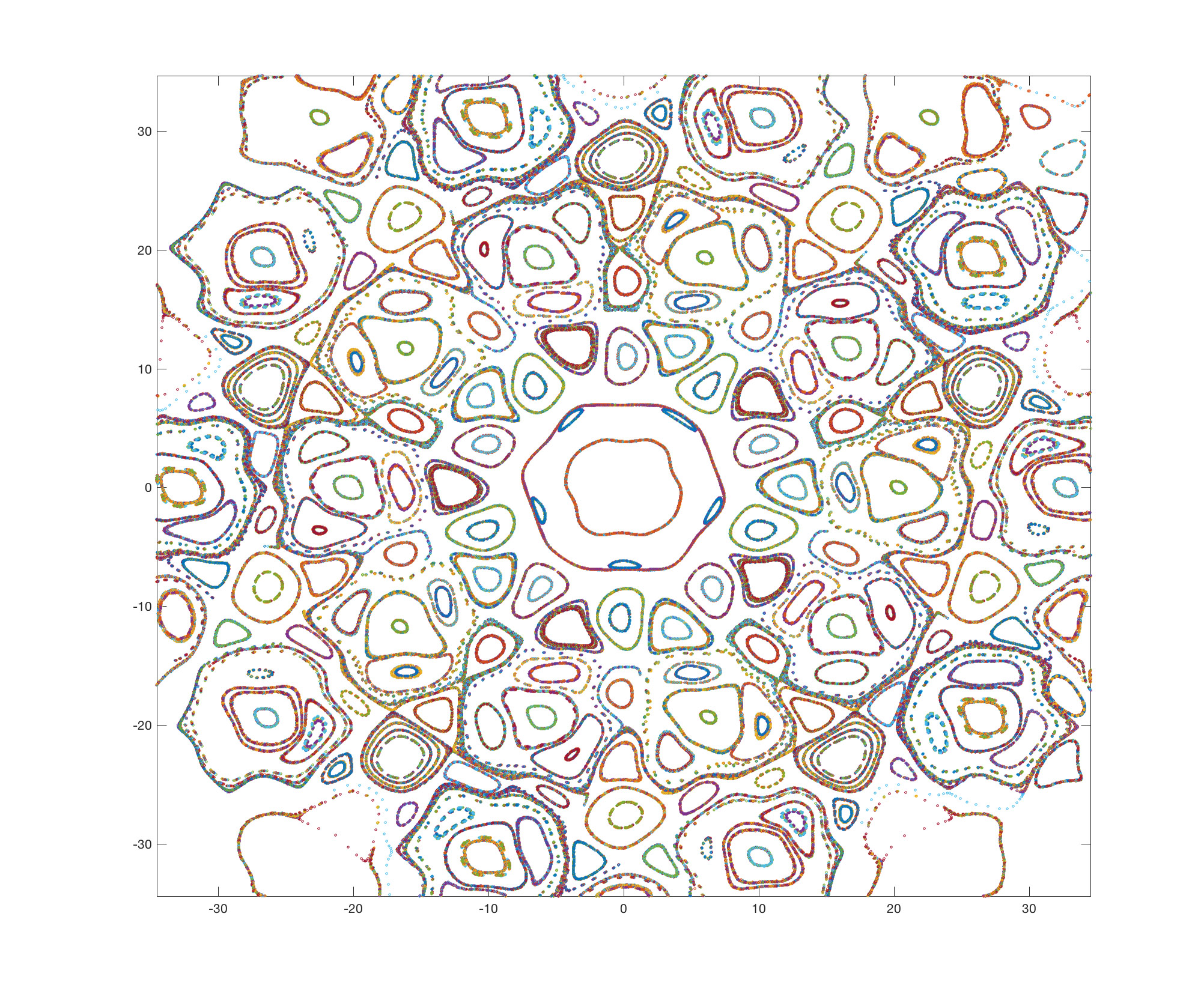
A simple discrete iterative map that captures the essential behavior of the three-body problem begins with action-angle variables that are coupled through a perturbation. Variations on this model have several names: the Twist Map, the Chirikov Map and the Standard Map. The essential mapping is

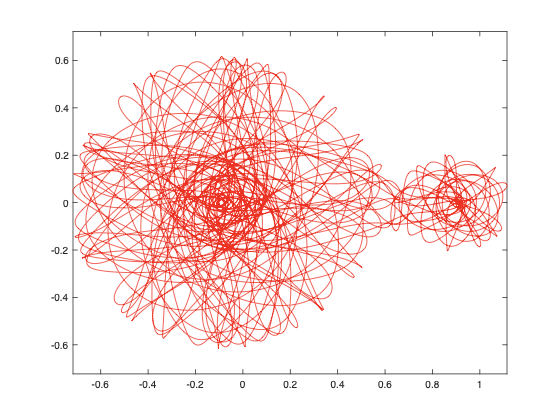
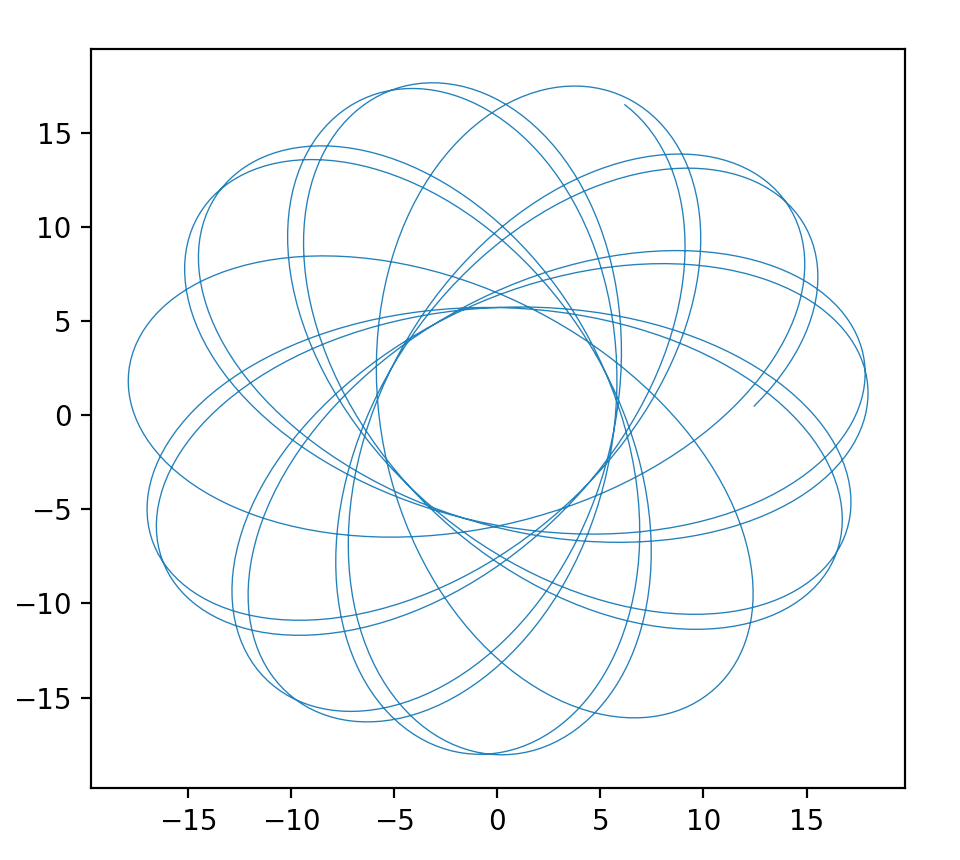
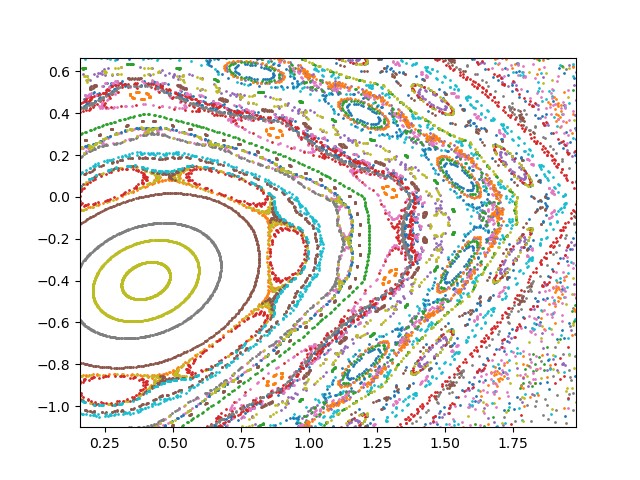
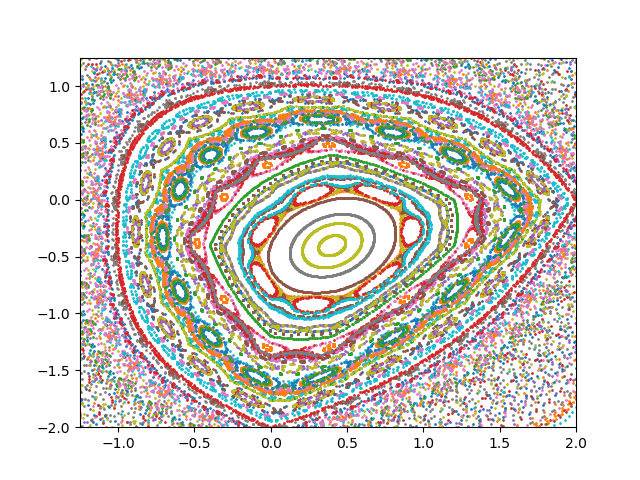
where J is an action variable (like angular momentum) paired with the angle variable. Initial conditions for the action and the angle are selected, and then all later values are obtained by iteration. The perturbation parameter is given by ε. If ε = 0 then all orbits are perfectly regular and circular. But as the perturbation increases, the open orbits split up into chains of closed (periodic) orbits. As the perturbation increases further, chaotic behavior emerges. The situation for ε = 0.9 is shown in the figure below. There are many regular periodic orbits as well as open orbits. Yet there are simultaneously regions of chaotic behavior. This figure shows an intermediate case where regular orbits can coexist with chaotic ones. The key is the orbital period ratio. For orbital ratios that are sufficiently irrational, the orbits remain open and regular. Bur for orbital ratios that are ratios of small integers, the perturbation is strong enough to drive the dynamics into chaos.

Python Code
(Python code on GitHub.)
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
Created on Wed Oct. 2, 2019
@author: nolte
"""
import numpy as np
from scipy import integrate
from matplotlib import pyplot as plt
plt.close('all')
eps = 0.9
np.random.seed(2)
plt.figure(1)
for eloop in range(0,50):
rlast = np.pi*(1.5*np.random.random()-0.5)
thlast = 2*np.pi*np.random.random()
orbit = np.int(200*(rlast+np.pi/2))
rplot = np.zeros(shape=(orbit,))
thetaplot = np.zeros(shape=(orbit,))
x = np.zeros(shape=(orbit,))
y = np.zeros(shape=(orbit,))
for loop in range(0,orbit):
rnew = rlast + eps*np.sin(thlast)
thnew = np.mod(thlast+rnew,2*np.pi)
rplot[loop] = rnew
thetaplot[loop] = np.mod(thnew-np.pi,2*np.pi) - np.pi
rlast = rnew
thlast = thnew
x[loop] = (rnew+np.pi+0.25)*np.cos(thnew)
y[loop] = (rnew+np.pi+0.25)*np.sin(thnew)
plt.plot(x,y,'o',ms=1)
plt.savefig('StandMapTwist')
The twist map for three values of ε are shown in the figure below. For ε = 0.2, most orbits are open, with one elliptic point and its associated hyperbolic point. At ε = 0.9 the periodic elliptic point is still stable, but the hyperbolic point has generated a region of chaotic orbits. There is still a remnant open orbit that is associated with an orbital period ratio at the Golden Ratio. However, by ε = 0.97, even this most stable orbit has broken up into a chain of closed orbits as the chaotic regions expand.

Safety in Numbers
In our solar system, governed by gravitational attractions, the square of the orbital period increases as the cube of the average radius (Kepler’s third law). Consider the restricted three-body problem of the Sun and Jupiter with the Earth as the third body. If we analyze the stability of the Earth’s orbit as a function of distance from the Sun, the orbital ratio relative to Jupiter would change smoothly. Near our current position, it would be in a 12:1 resonance, but as we moved farther from the Sun, this ratio would decrease. When the orbital period ratio is sufficiently irrational, then the orbit would be immune to Jupiter’s pull. But as the orbital ratio approaches ratios of integers, the effect gets larger. Close enough to Jupiter there would be a succession of radii that had regular motion separated by regions of chaotic motion. The regions of regular motion associated with irrational numbers act as if they were a barrier, restricting the range of chaotic orbits and protecting more distant orbits from the chaos. In this way numbers, rational versus irrational, protect us from the chaos of our own solar system.
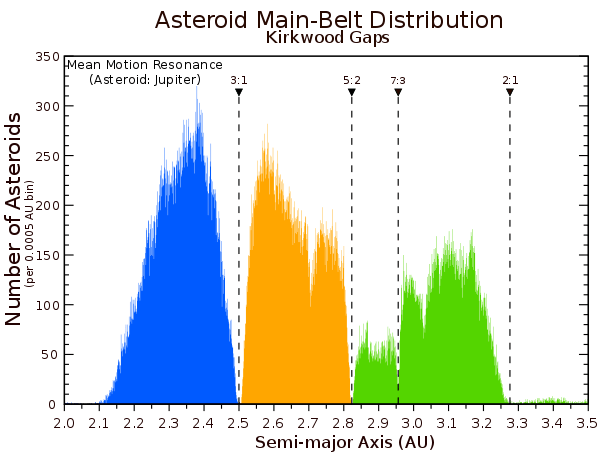
A dramatic demonstration of the orbital resonance effect can be seen with the asteroid belt. The many small bodies act as probes of the orbital resonances. The repetitive tug of Jupiter opens gaps in the distribution of asteroid radii, with major gaps, called Kirkwood Gaps, opening at orbital ratios of 3:1, 5:2, 7:3 and 2:1. These gaps are the radii where chaotic behavior occurs, while the regions in between are stable. Most asteroids spend most of their time in the stable regions, because chaotic motion tends to sweep them out of the regions of resonance. This mechanism for the Kirkwood gaps is the same physics that produces gaps in the rings of Saturn at resonances with the many moons of Saturn.
Further Reading
For a detailed history of the development of KAM theory, see Chapter 9 Butterflies to Hurricanes in Galileo Unbound (Oxford University Press, 2018).
For a more detailed mathematical description of the KAM theory, see Chapter 5, Hamiltonian Chaos, in Introduction to Modern Dynamics, 2nd edition (Oxford University Press, 2019).
See also:
Dumas, H. S., The KAM Story: A friendly introduction to the content, history and significance of Classical Kolmogorov-Arnold-Moser Theory. World Scientific: 2014.
Arnold, V. I., From superpositions to KAM theory. Vladimir Igorevich Arnold. Selected Papers 1997, PHASIS, 60, 727–740.